看前须知:本篇文章不会说太多理论性的内容(重点在理论结合实践),顾及实操,应用,一切理论内容支撑都是为了后续实际操作进行铺垫,重点在于读者可以看完文章应用。(也为节约读者时间,节约学习时间成本)
一、理论部分
CAN总线(Controller Area Network Bus)控制器局域网总线
CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域
CAN硬件电路
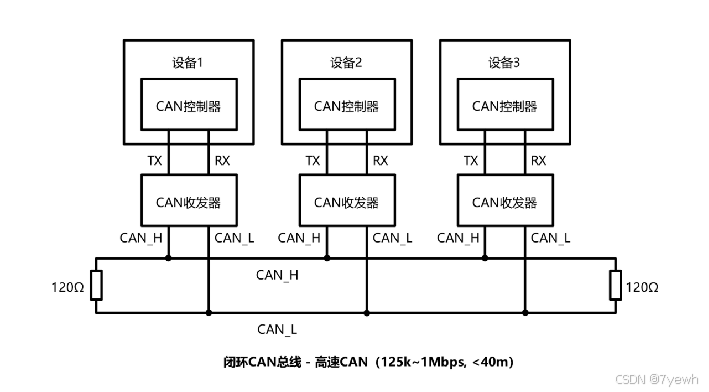
每个设备通过CAN收发器挂载在CAN总线网络上
CAN控制器引出的TX和RX与CAN收发器相连,CAN收发器引出的CAN_H和CAN_L分别与总线的CAN_H和CAN_L相连
 (xCAN_TX直连CAN收发器TX,同理RX如此)
(xCAN_TX直连CAN收发器TX,同理RX如此)
高速CAN使用闭环网络,CAN_H和CAN_L两端添加120Ω的终端电阻
(避免回波反射的作用)
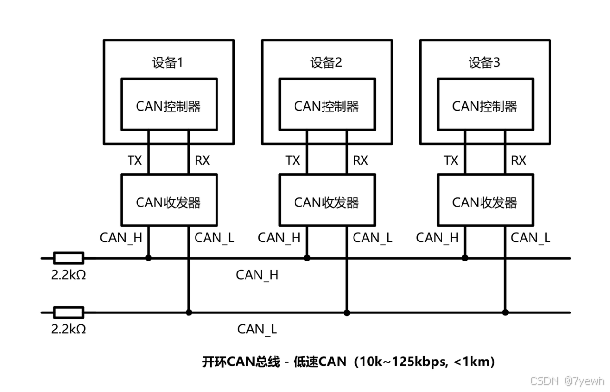
低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2kΩ的终端电阻
(类IIC有着上拉的作用)
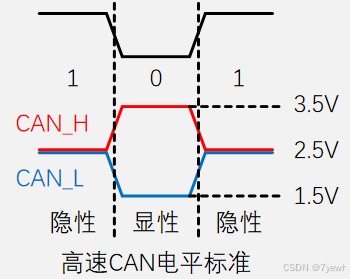
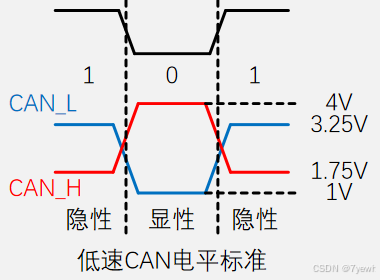
CAN电平标准
CAN总线特征:
两根通信线(CAN_H、CAN_L),线路少
差分信号通信,抗干扰能力强
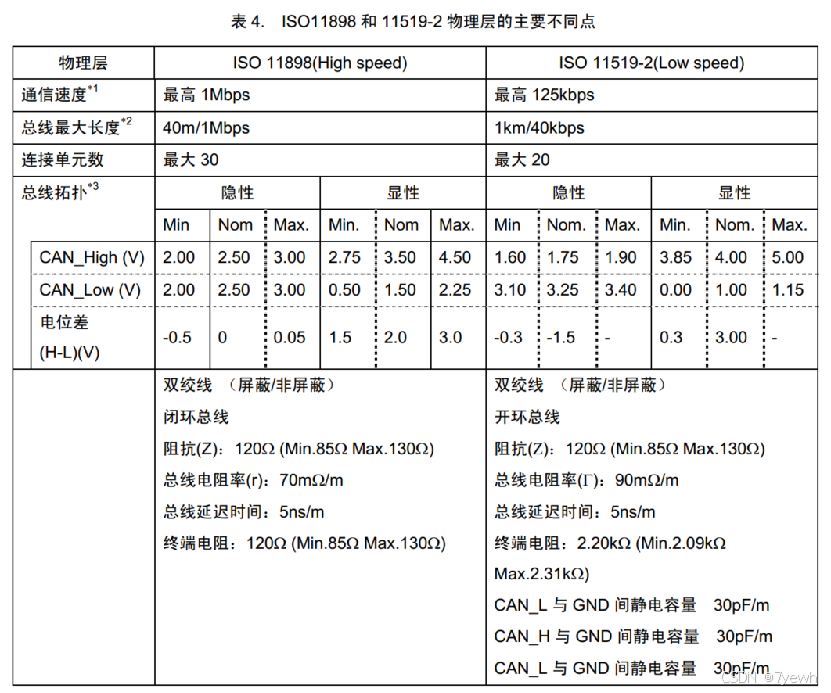
高速CAN(ISO11898):125k~1Mbps, <40m
低速CAN(ISO11519):10k~125kbps, <1km
异步,无需时钟线,通信速率由设备各自约定
半双工,可挂载多设备,多设备同时发送数据时通过仲裁判断先后顺序
11位/29位报文ID,用于区分消息功能,同时决定优先级
可配置1~8字节的有效载荷
可实现广播式和请求式两种传输方式
应答、CRC校验、位填充、位同步、错误处理等特性
| 帧类型 | 用途 |
| 数据帧 | 发送设备主动发送数据(广播式) |
| 遥控帧 | 接收设备主动请求数据(请求式) |
| 错误帧 | 某个设备检测出错误时向其他设备通知错误 |
| 过载帧 | 接收设备通知其尚未做好接收准备 |
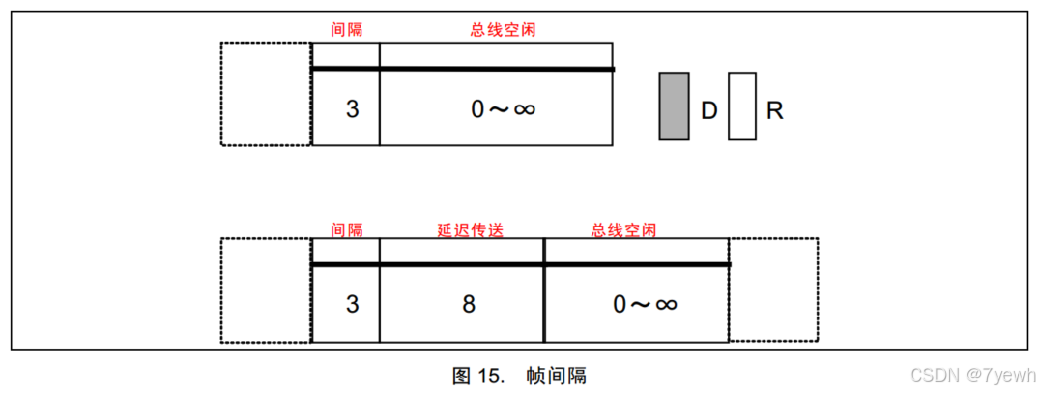
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开 |
| 字段 | 经典CAN (CAN 2.0) | FDCAN |
|---|---|---|
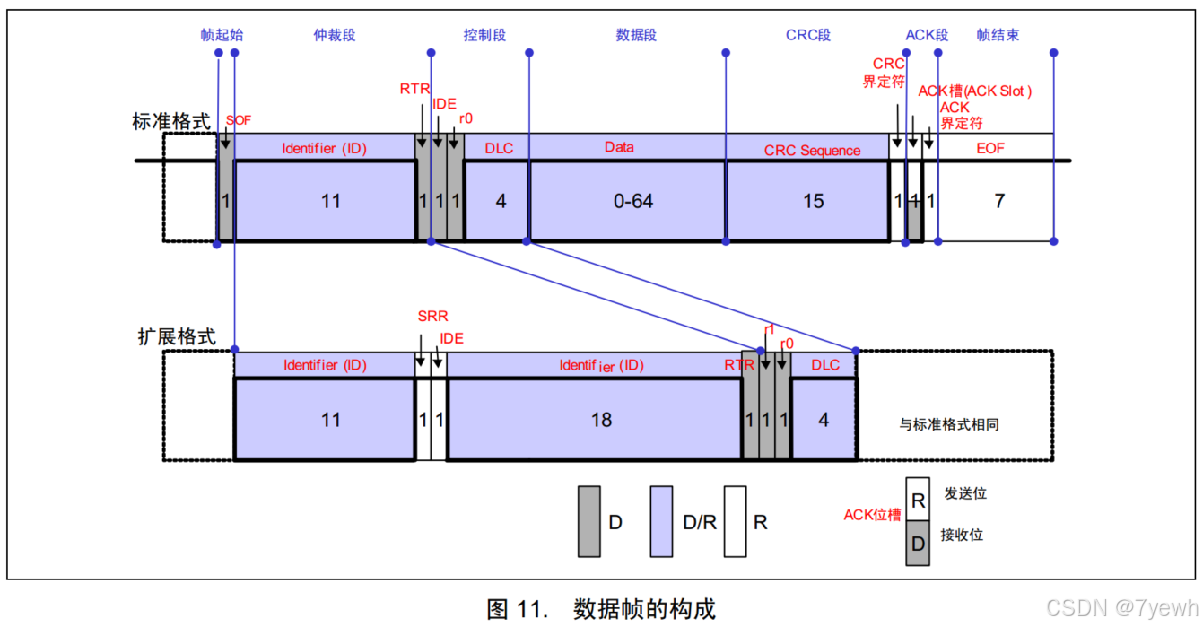
| SOF(Start of Frame) | 帧起始 | 帧起始 |
| ID(Identifier) | 11位/29位 | 11位/29位 |
| RTR(Remote Transmission Request) | 远程请求位 | 仅在经典CAN模式下有效 |
| IDE(Identifier Extension) | 扩展标志位 | 扩展标志位 |
| SRR(Substitute Remote Request) | 替代RTR | 替代RTR |
| r0/r1(Reserve) | 1位保留 | 2位保留 |
| FDF(Flexible Data-rate Format) | 无 | 指示是否为FDCAN帧 |
| BRS(Bit Rate Switching) | 无 | 指示数据段是否使用更高波特率 |
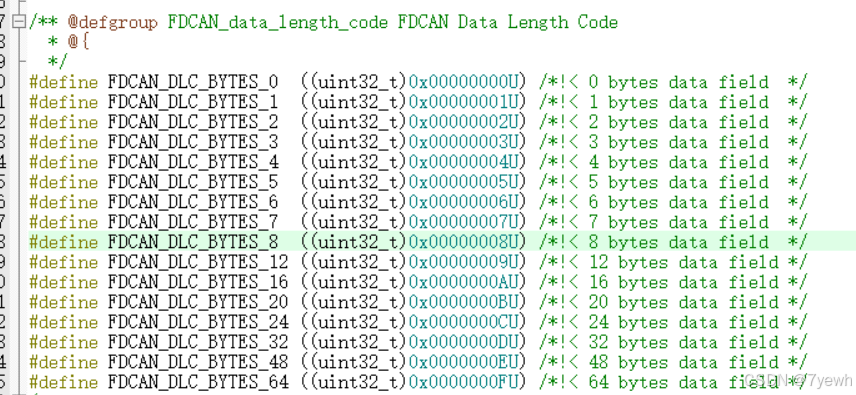
| DLC(Data Length Code) | 4位(支持0~8字节) | 4位(支持0~64字节) |
| Data | 0~8 字节 | 0~64 字节 |
| CRC(Cyclic Redundancy Check) | 15/17位 | 17/21位 |
| ACK(Acknowledgement) | 应答位 | 应答位 |
| CRC/ACK界定符 | 为ACK前后提供时间 | 为ACK前后提供时间 |
| EOF(End of Frame) | 帧结束 | 帧结束 |
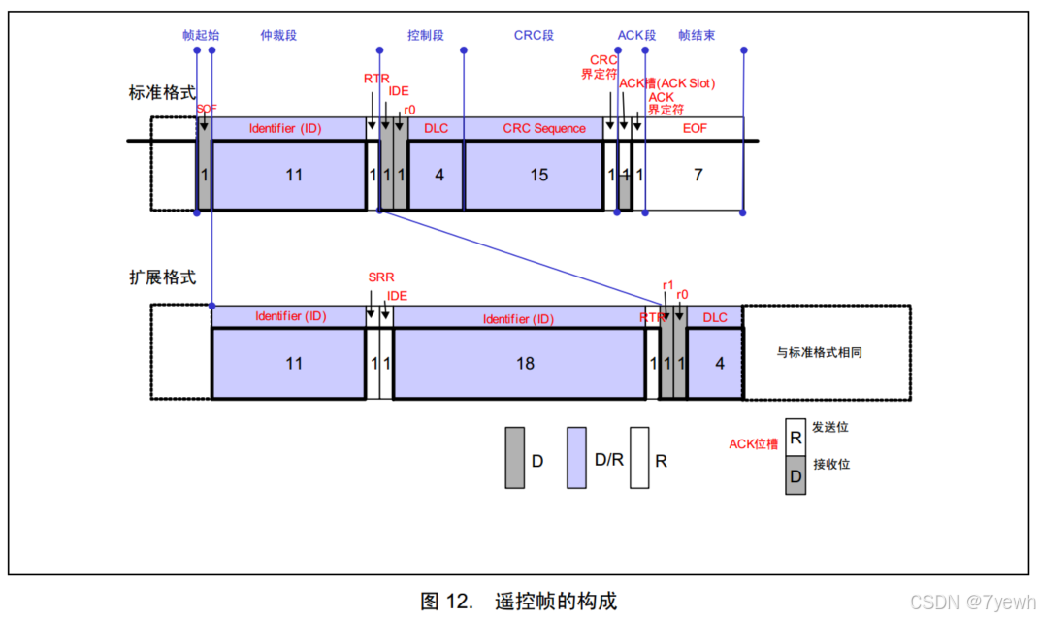
遥控帧
遥控帧无数据段,RTR为隐性电平1,其他部分与数据帧相同
错误帧
总线上所有设备都会监督总线的数据,一旦发现“位错误”或“填充错误”或“CRC错误”或“格式错误”或“应答错误” ,这些设备便会发出错误帧来破坏数据,同时终止当前的发送设备

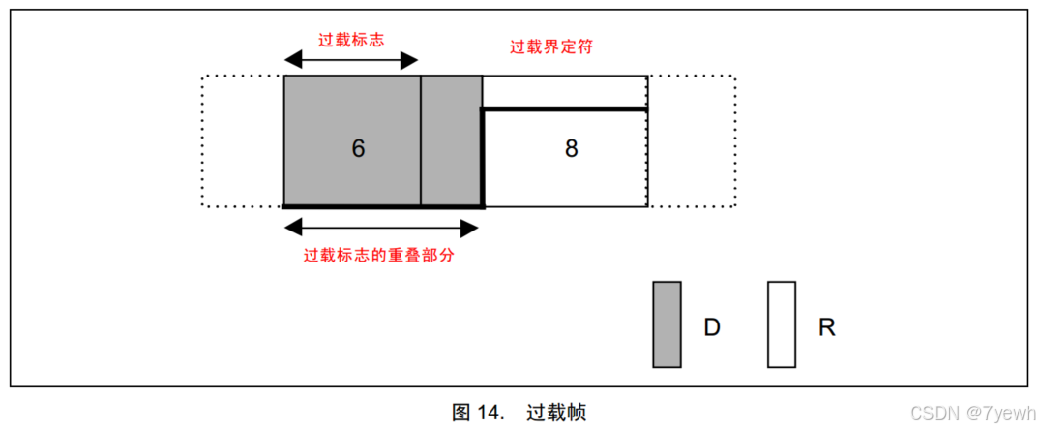
过载帧
当接收方收到大量数据而无法处理时,其可以发出过载帧,延缓发送方的数据发送,以平衡总线负载,避免数据丢失
帧间隔
将数据帧和遥控帧与前面的帧分离开
位填充
发送方 每发送 5 个连续相同电平位(0 或 1)后,自动插入 1 个相反电平的填充位。
接收方 在收到数据时,会检测并移除填充位,恢复原始数据流。
| 即将发送的原始数据 | 实际发送的数据(填充后) | 接收后移除填充 |
|---|---|---|
100000110 | 1000001110 | 100000110 |
10000011110 | 1000001111100 | 10000011110 |
0111111111110 | 011111011111010 | 0111111111110 |
FDCAN(Flexible Data-rate CAN)是CAN总线的升级版本,旨在提高数据传输速度和数据负载能力。它兼容经典CAN(CAN2.0),同时提供更高效的通信性能,使其在汽车电子、工业控制、机器人等领域得到广泛应用。
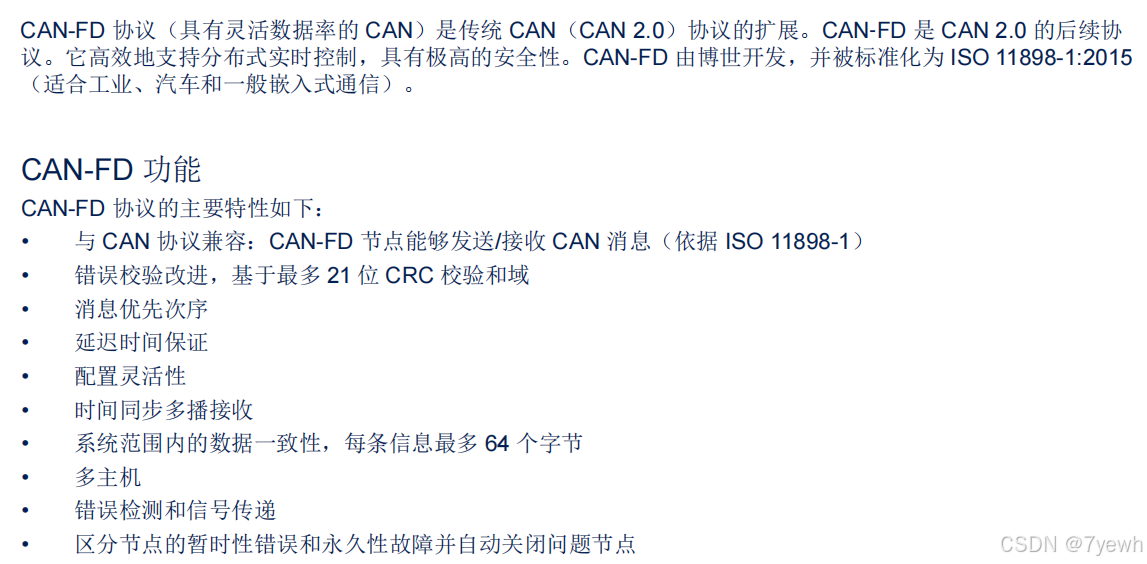

FDCAN 主要特性
更高的数据速率:
最高可达 8Mbps(相比经典CAN的1Mbps有大幅提升)。
更大的数据负载:
经典CAN最大数据长度:8字节
FDCAN最大数据长度:64字节
更高效的协议:
采用 位速率切换(BRS, Bit Rate Switching):允许在数据段提升传输速率,提高吞吐量。
改进的错误检测机制:包括Cyclic Redundancy Check(CRC)增强,提高数据可靠性。
兼容性:
向下兼容 经典CAN,可与CAN 2.0设备共存。
可以混合经典CAN和FDCAN设备,确保平滑升级。
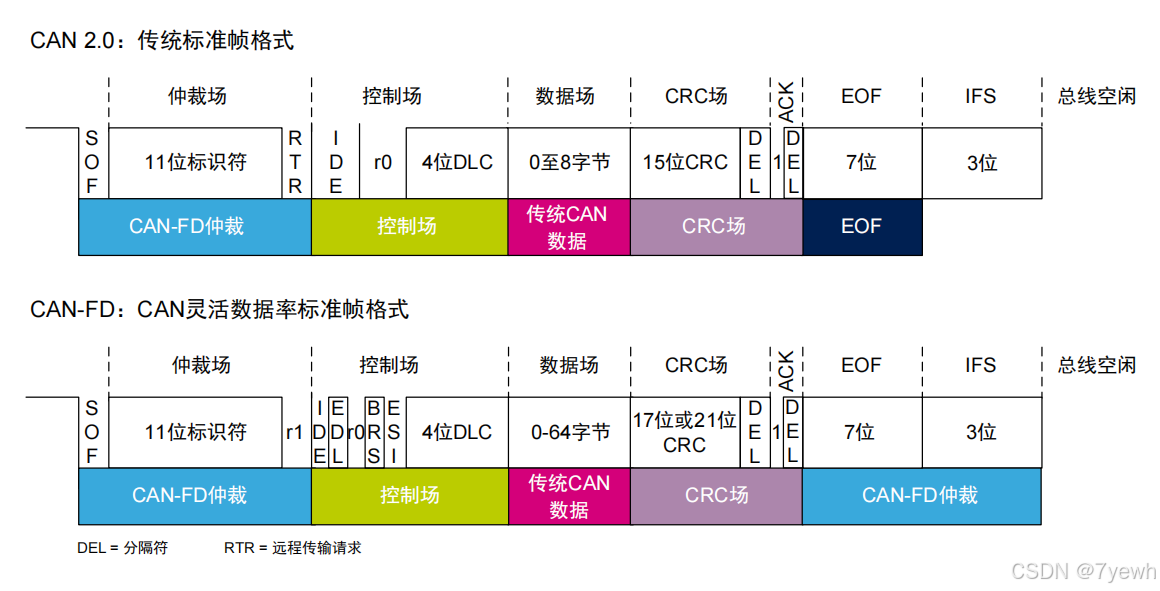
FDCAN的帧格式,FDCAN与经典CAN的帧结构类似,但在数据段长度和速率切换上有所不同:
标准帧格式(11-bit 标准 ID)
扩展帧格式(29-bit 扩展 ID)
数据字段可变(8~64 字节)
位速率切换(BRS) 用于在数据段加速传输
| 字段 | 说明 |
|---|---|
| 帧起始(SOF) | 表示帧开始 |
| 标识符(ID) | 11位/29位 |
| 控制字段 | 指示数据长度、BRS、FDF(FDCAN帧标识)等 |
| 数据字段 | 可变长度(0~64字节) |
| CRC 校验 | 用于错误检测 |
| 确认字段 | 其他节点发送ACK |
| 帧结束 | 结束标识 |
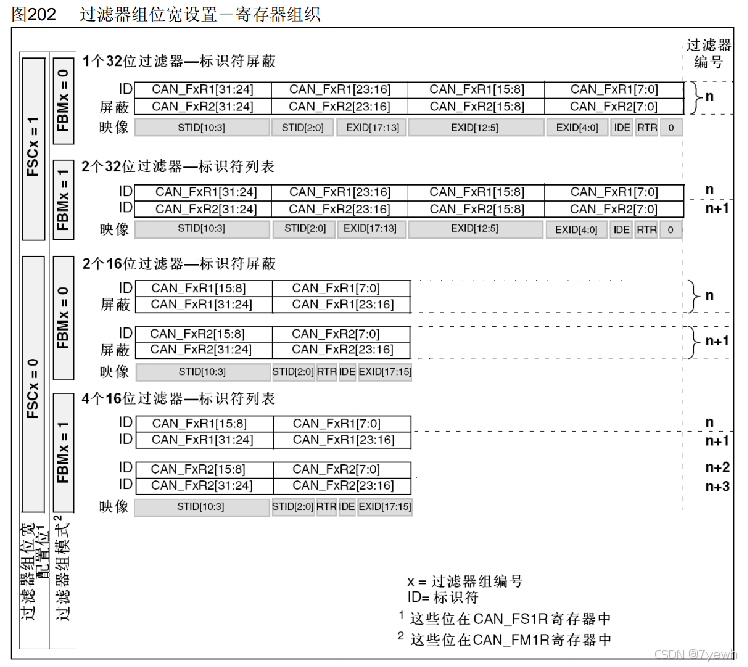
标识符过滤器
每个过滤器单元由 4 个关键控制位 + 2 个 32 位寄存器(R1 和 R2)组成:
| 配置项 | 作用 | 说明 |
|---|---|---|
| FSCx(Filter Scale,位宽设置) | 选择过滤器位宽 | 0:16 位模式(适用于 标准 ID)。 1:32 位模式(适用于 扩展 ID)。 |
| FBMx(Filter Mode,模式设置) | 选择过滤模式 | 0:屏蔽模式(Mask Mode)。 1:列表模式(List Mode)。 |
| FFAx(Filter FIFO Assignment,关联 FIFO) | 指定接收 FIFO | 0:匹配的消息进入 FIFO 0。 1:匹配的消息进入 FIFO 1。 |
| FACTx(Filter Activation,激活设置) | 启用或禁用过滤器 | 0:过滤器禁用(不使用)。 1:过滤器启用(使用)。 |
标准 ID,屏蔽模式,匹配 0x100 ~ 0x1FF
FDCAN_FilterTypeDef sFilterConfig;
sFilterConfig.IdType = FDCAN_STANDARD_ID; // 标准 ID(11-bit)
sFilterConfig.FilterIndex = 0; // 过滤器索引 0
sFilterConfig.FilterType = FDCAN_FILTER_MASK; // 屏蔽模式
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0; // 关联 FIFO 0
sFilterConfig.FilterID1 = 0x100; // 基准 ID
sFilterConfig.FilterID2 = 0x700; // 掩码(低 8 位可变)if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
{Error_Handler();
}
扩展 ID,列表模式,匹配 0x12345678
sFilterConfig.IdType = FDCAN_EXTENDED_ID; // 扩展 ID(29-bit)
sFilterConfig.FilterIndex = 1; // 过滤器索引 1
sFilterConfig.FilterType = FDCAN_FILTER_LIST; // 列表模式
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1; // 关联 FIFO 1
sFilterConfig.FilterID1 = 0x12345678; // 仅允许此 ID
sFilterConfig.FilterID2 = 0x00000000; // 备用if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
{Error_Handler();
}
FDCAN 具有 两个接收 FIFO(FIFO 0 和 FIFO 1):
FIFO 0:通常用于 高优先级消息。
FIFO 1:用于 低优先级或非关键消息。
在过滤器配置时:
FFAx = 0:匹配的消息存入 FIFO 0。
FFAx = 1:匹配的消息存入 FIFO 1。
过滤器的激活
所有过滤器在默认情况下 禁用(FACTx=0),需要手动激活:
HAL_FDCAN_Start(&hfdcan1);
如果需要修改过滤器,先禁用,再重新配置:
HAL_FDCAN_Stop(&hfdcan1);
HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig);
HAL_FDCAN_Start(&hfdcan1);
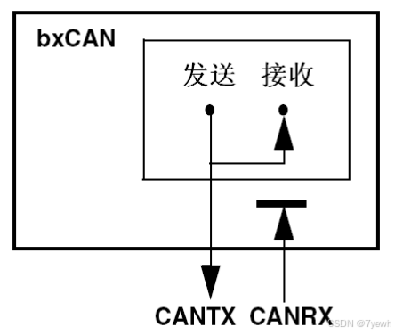
测试模式
静默模式:用于分析CAN总线的活动,不会对总线造成影响
hfdcan1.Init.Mode = FDCAN_MODE_BUS_MONITORING; // 设为静默模式
HAL_FDCAN_Init(&hfdcan1);

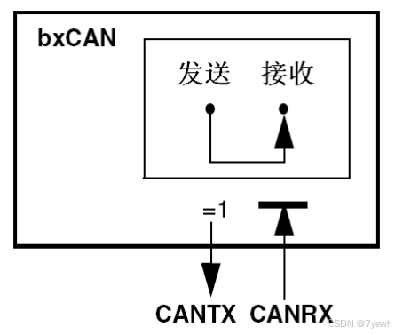
环回模式:用于自测试,同时发送的报文可以在CAN_TX引脚上检测到
hfdcan1.Init.Mode = FDCAN_MODE_INTERNAL_LOOPBACK; // 设为环回模式
HAL_FDCAN_Init(&hfdcan1);
环回静默模式:用于热自测试,自测的同时不会影响CAN总线
hfdcan1.Init.Mode = FDCAN_MODE_EXTERNAL_LOOPBACK; // 设为环回静默模式
HAL_FDCAN_Init(&hfdcan1);
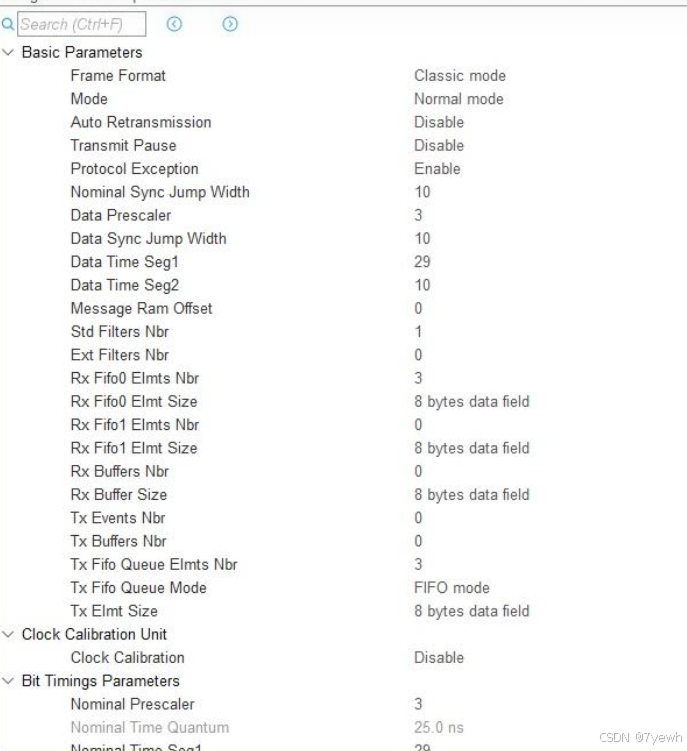
二、实操部分
下述配置可以用到相关的软件比如笔者用的这款软件。
重点说明下配置问题
#include "fdcan.h"/* USER CODE BEGIN 0 */
//FDCAN_RxHeaderTypeDef RxHeader;
//uint8_t RxData[8];
//FDCAN_TxHeaderTypeDef TxHeader;
//uint8_t TxData[8]={0};
/* USER CODE END 0 */FDCAN_HandleTypeDef hfdcan2;/* FDCAN2 init function */
void MX_FDCAN2_Init(void)
{/* USER CODE BEGIN FDCAN2_Init 0 *//* USER CODE END FDCAN2_Init 0 *//* USER CODE BEGIN FDCAN2_Init 1 *//* USER CODE END FDCAN2_Init 1 */hfdcan2.Instance = FDCAN2;hfdcan2.Init.ClockDivider = FDCAN_CLOCK_DIV1;hfdcan2.Init.FrameFormat = FDCAN_FRAME_FD_BRS;hfdcan2.Init.Mode = FDCAN_MODE_NORMAL;hfdcan2.Init.AutoRetransmission = DISABLE;hfdcan2.Init.TransmitPause = DISABLE;hfdcan2.Init.ProtocolException = DISABLE;hfdcan2.Init.NominalPrescaler = 4;hfdcan2.Init.NominalSyncJumpWidth = 4;hfdcan2.Init.NominalTimeSeg1 = 31;hfdcan2.Init.NominalTimeSeg2 = 8;hfdcan2.Init.DataPrescaler = 2; hfdcan2.Init.DataSyncJumpWidth = 4;hfdcan2.Init.DataTimeSeg1 = 11;hfdcan2.Init.DataTimeSeg2 = 4;hfdcan2.Init.StdFiltersNbr = 0;hfdcan2.Init.ExtFiltersNbr = 0;hfdcan2.Init.TxFifoQueueMode = FDCAN_TX_FIFO_OPERATION;if (HAL_FDCAN_Init(&hfdcan2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN FDCAN2_Init 2 *//* USER CODE END FDCAN2_Init 2 */}void HAL_FDCAN_MspInit(FDCAN_HandleTypeDef* fdcanHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};if(fdcanHandle->Instance==FDCAN2){/* USER CODE BEGIN FDCAN2_MspInit 0 *//* USER CODE END FDCAN2_MspInit 0 *//** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_FDCAN;PeriphClkInit.FdcanClockSelection = RCC_FDCANCLKSOURCE_PLL;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}/* FDCAN2 clock enable */__HAL_RCC_FDCAN_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/**FDCAN2 GPIO ConfigurationPB6 ------> FDCAN2_TXPB5 ------> FDCAN2_RX*/GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF9_FDCAN2;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN FDCAN2_MspInit 1 *//* USER CODE END FDCAN2_MspInit 1 */}
}void HAL_FDCAN_MspDeInit(FDCAN_HandleTypeDef* fdcanHandle)
{if(fdcanHandle->Instance==FDCAN2){/* USER CODE BEGIN FDCAN2_MspDeInit 0 *//* USER CODE END FDCAN2_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_FDCAN_CLK_DISABLE();/**FDCAN2 GPIO ConfigurationPB6 ------> FDCAN2_TXPB5 ------> FDCAN2_RX*/HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_5);/* USER CODE BEGIN FDCAN2_MspDeInit 1 *//* USER CODE END FDCAN2_MspDeInit 1 */}
}/* USER CODE BEGIN 1 */
//void FDCAN2_Config(void)
//{
// FDCAN_FilterTypeDef sFilterConfig;
//
// sFilterConfig.IdType = FDCAN_STANDARD_ID;
// sFilterConfig.FilterIndex = 0;
// sFilterConfig.FilterType = FDCAN_FILTER_MASK;
// sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
// sFilterConfig.FilterID1 = 0x000;
// sFilterConfig.FilterID2 = 0x000;
// if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
// {
// Error_Handler();
// }
//
// sFilterConfig.IdType = FDCAN_EXTENDED_ID;
// sFilterConfig.FilterIndex = 0;
// sFilterConfig.FilterType = FDCAN_FILTER_RANGE;
// sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
// sFilterConfig.FilterID1 = 0x00000000;
// sFilterConfig.FilterID2 = 0x1FFFFFFF;
// if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_ConfigGlobalFilter(&hfdcan2, FDCAN_REJECT, FDCAN_REJECT, FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE) != HAL_OK)
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_Start(&hfdcan2) != HAL_OK)//启动CAN
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_ActivateNotification(&hfdcan2, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, 0) != HAL_OK)//设置中断使能
// {
// Error_Handler();
// }
// TxHeader.Identifier = 0x000;
// TxHeader.IdType = FDCAN_STANDARD_ID;
// TxHeader.TxFrameType = FDCAN_DATA_FRAME;
// TxHeader.DataLength = FDCAN_DLC_BYTES_8;
// TxHeader.ErrorStateIndicator = FDCAN_ESI_PASSIVE;
// TxHeader.BitRateSwitch = FDCAN_BRS_OFF;
// TxHeader.FDFormat = FDCAN_CLASSIC_CAN;
// TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
// TxHeader.MessageMarker = 0;
//
// //HAL_FDCAN_Start(&hfdcan2); 滤波器后方已经配置
//}
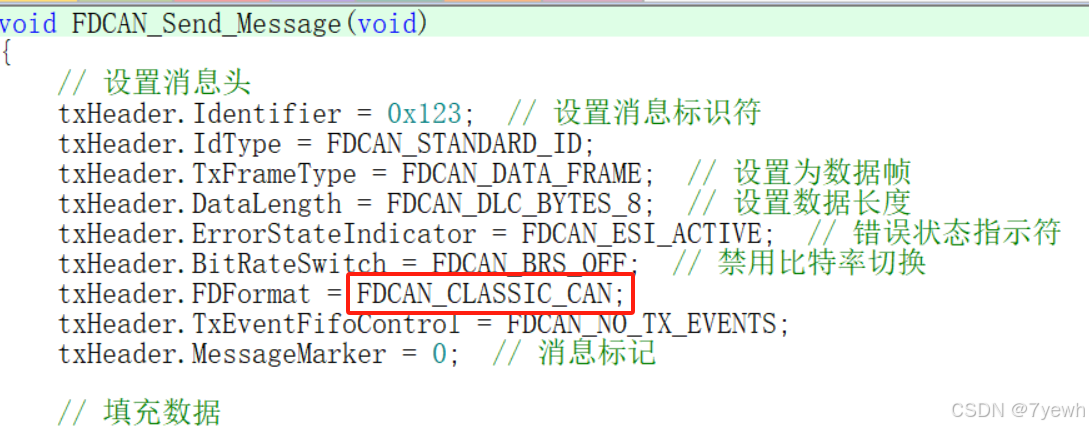
/* USER CODE END 1 */txHeader.Identifier = 0x123; // 设置消息标识符
txHeader.IdType = FDCAN_STANDARD_ID;
txHeader.TxFrameType = FDCAN_DATA_FRAME; // 设置为数据帧
txHeader.DataLength = FDCAN_DLC_BYTES_64;
txHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
txHeader.BitRateSwitch = FDCAN_BRS_ON;
txHeader.FDFormat = FDCAN_FD_CAN; //FDCAN_FD_CAN
txHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
txHeader.MessageMarker = 0; // 消息标记代码内容就分析到这,更多问题可以联系博主。






