SICAR程序标准功能块 FB1512 “Robot_kuka_FB“
2025/4/24 20:35:48
来源:https://blog.csdn.net/weixin_38223427/article/details/147356730
浏览:
次
关键词:SICAR程序标准功能块 FB1512 “Robot_kuka_FB“
1、FB1512功能块截图
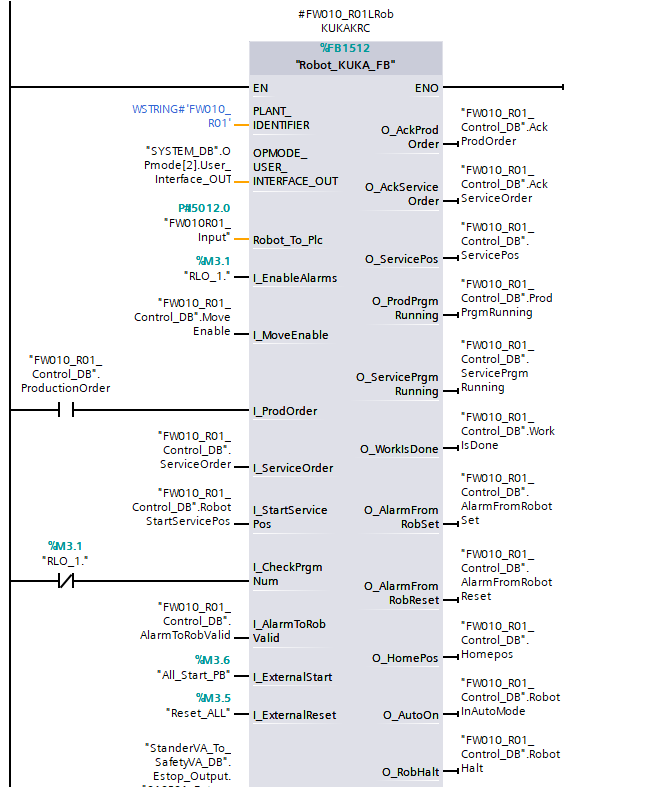
2、FB1512 功能块引脚功能定义
一、输入引脚
- EN:使能输入,决定功能块是否执行。
- IDENTIFIER(WSTRING#"FW010_R01"):设备标识,指定关联的机器人设备。
- OPMODE_USER_INTERFACE_OUT:操作模式输入,定义机器人工作模式(如手动、自动),数据源自系统数据库。
- Robot_To_PLC(PH5012.0 "FW010R01_Input"):机器人到 PLC 的数据输入,传递机器人状态、参数等信息。
- L_EnableAlarms(%M3.1 "RLO_1"):报警使能输入,激活机器人报警功能。
- L_MoveEnable("FW010_R01_Control_DB".MoveEnable):移动使能输入,允许机器人执行移动操作。
- L_ProdOrder("FW010_R01_Control_DB".ProductionOrder):生产订单输入,触发生产相关操作。
- L_ServiceOrder("FW010_R01_Control_DB".ServiceOrder):服务订单输入,触发维护或服务操作。
- L_StartServicePos("FW010_R01_Control_DB".RobotStartServicePos):启动服务位置输入,指示机器人移动到预设服务位置。
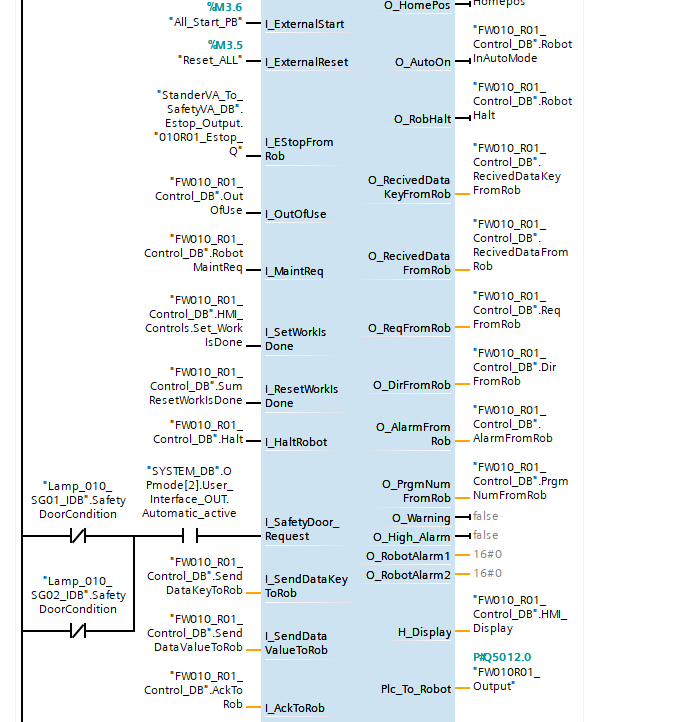
- L_CheckPrgmNum:检查程序号输入,验证机器人运行程序编号。
- L_AlarmToRobValid("FW010_R01_Control_DB".AlarmToRobValid):确认发送至机器人的报警信息有效。
- L_ExternalStart(%M3.6 "All_Start_PB"):外部启动输入,通过外部按钮启动流程。
- L_ExternalReset(%M3.5 "Reset_ALL"):外部复位输入,通过外部按钮复位系统或报警。
- L_EStopFromRob("StanderVA_To_SafetyVA_DB".Estop_Output.Q):机器人急停输入,接收机器人急停信号。
- L_OutOfUse("FW010_R01_Control_DB".OutOfUse):标记机器人是否停用。
- L_MaintReq("FW010_R01_Control_DB".RobotMaintReq):维护请求输入,提示机器人需要维护。
- L_SetWorksDone("FW010_R01_Control_DB".HMI_Controls.Set_WorkIsDone):设置工作完成


![LeetCode[232]用栈实现队列](http://pic.xiahunao.cn/nshx/LeetCode[232]用栈实现队列)


