一、VMwaer虚拟机复制粘贴设置:设置完记得重启VMwaer
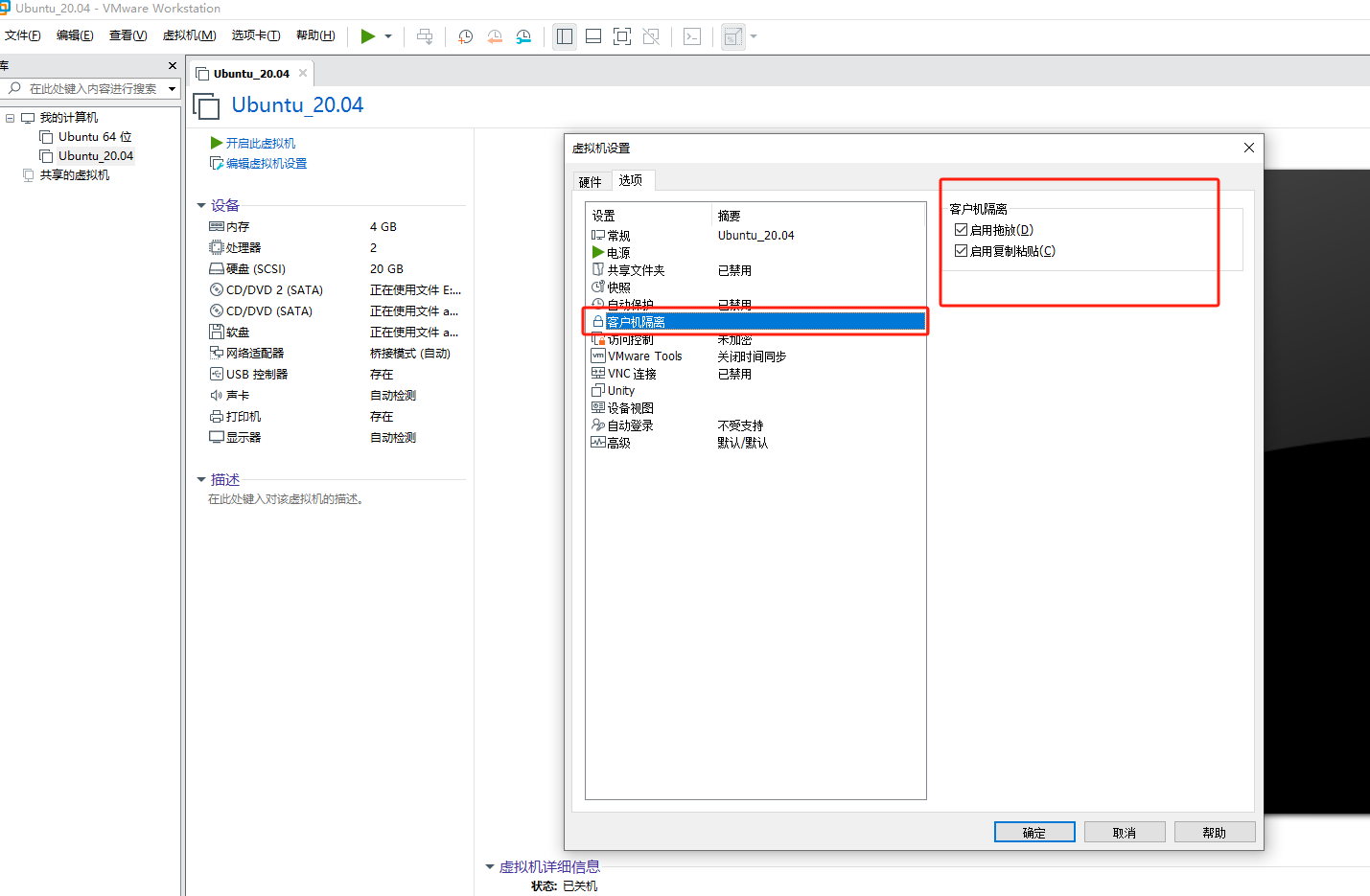
1.首先确定 虚拟机设置-->选项-->客户机隔离-->勾选 启用拖放 启用复制粘贴
2.如果还是不能粘贴 可能是 没有 VMware Tools
可参考 怎么在linux安装vmware tools-CSDN博客
设置完记得重启VMwaer。
二、ROS系统安装
1.视频参考:
机器人操作系统ROS的安装心得以及rosdep问题的处理_哔哩哔哩_bilibili
2.ROS安装网站参考:
ROS的官方安装步骤:
1、noetic / Ubuntu 20.04 : http://wiki.ros.org/noetic/Installation/Ubuntu
2、melodic / Ubuntu 18.04: http://wiki.ros.org/melodic/Installation/Ubuntu
3、kinetic / Ubuntu 16.04: http://wiki.ros.org/kinetic/Installation/Ubuntu
3.以20.04为例:
1.导入ROS安装源: 就是从哪里下载ROS的一些东西的网站源头。
由于1.2中的代码为国外的网站,下载ROS的一些软件、脚本等 会很慢 所以 点击
Mirros 进入 国产镜像源 在国产镜像源中下载这些东西就很快。

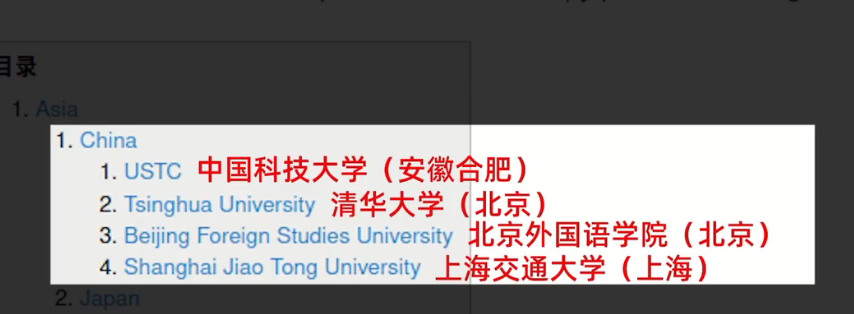
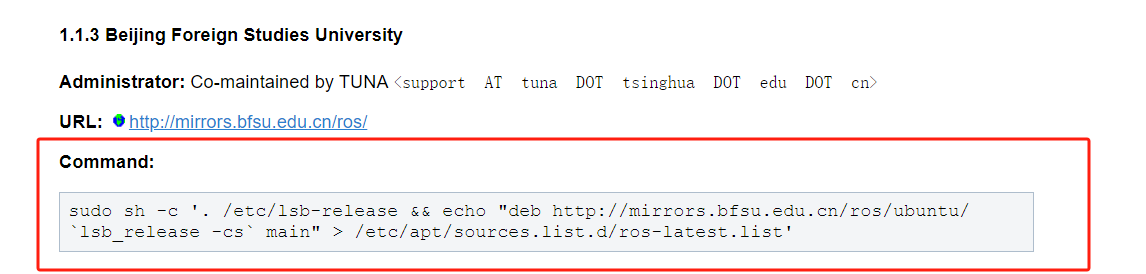
我选择了清华大学的源头,复制粘贴Command:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.bfsu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
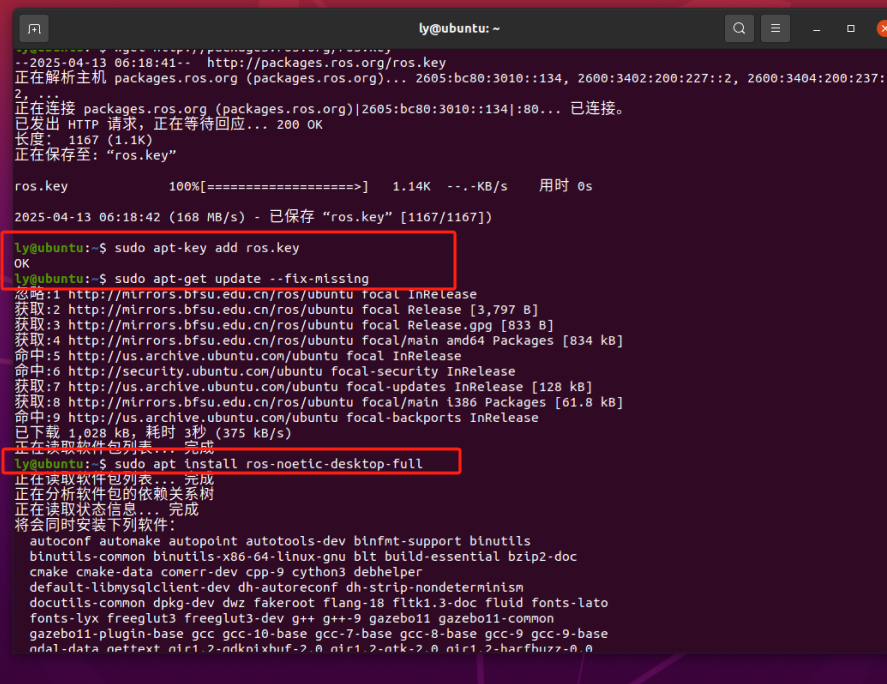
4.设置安装秘钥并且安装ROS:这样才能在这个源中下载ROS。但是容易连接不到服务器
报错:找不到有效的
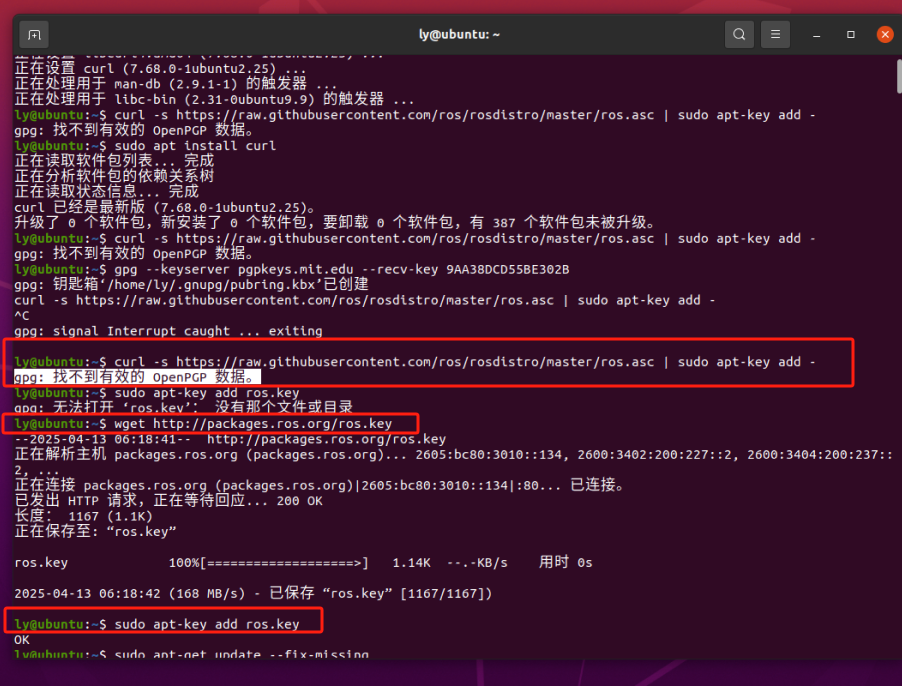
若出现no valid OpenPGP data found,找不到openpgp数据。 复制这四句命令 就开始下载ROS了。
wget http://packages.ros.org/ros.key
sudo apt-key add ros.key
sudo apt-get update --fix-missing
sudo apt install ros-noetic-desktop-full
如果sudo apt install ros-noetic-desktop-full无法定位软件包,执行命令 sudo apt-get update 后面再执行该命令
上面1.4 Installation 已经安装完成了。
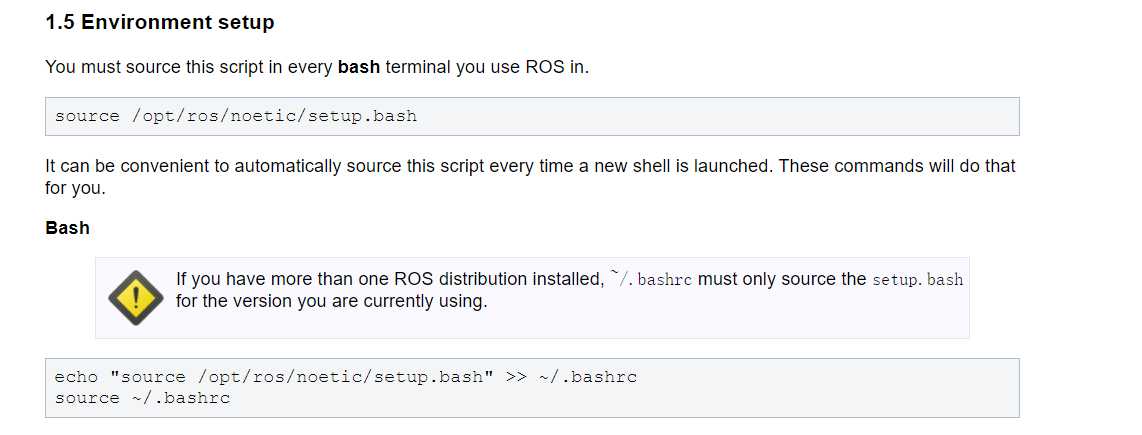
5.安装完成ROS后 就得配置环境参数设置
将ROS的环境设置脚本 添加到终端的初始化脚本里。
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc完事之后运行一次
roscore
ROS核心就运行起来了 可以看到ROS的版本和信息
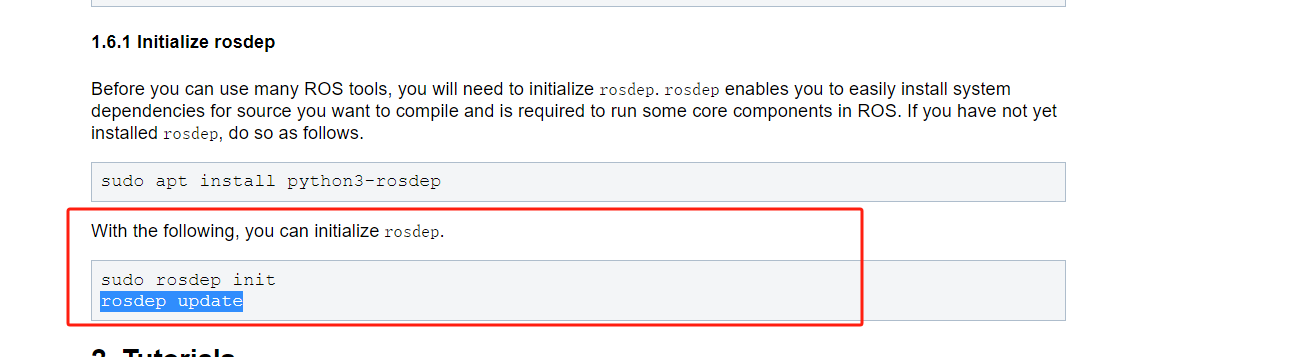
6.Rosdep 初始化:ROS依赖包工具初始化 方便以后安装第三方的扩展软件包。
这个应该是不能响应:由于网络原因 如果能响应则 直接一步一步来 不行则
因为网络原因不会响应: sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
rosdep连接超时的问题,在终端程序中依次执行如下三条指令:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
然后继续按照官方步骤操作即可。
继续后就是
sudo rosdep init rosdep update
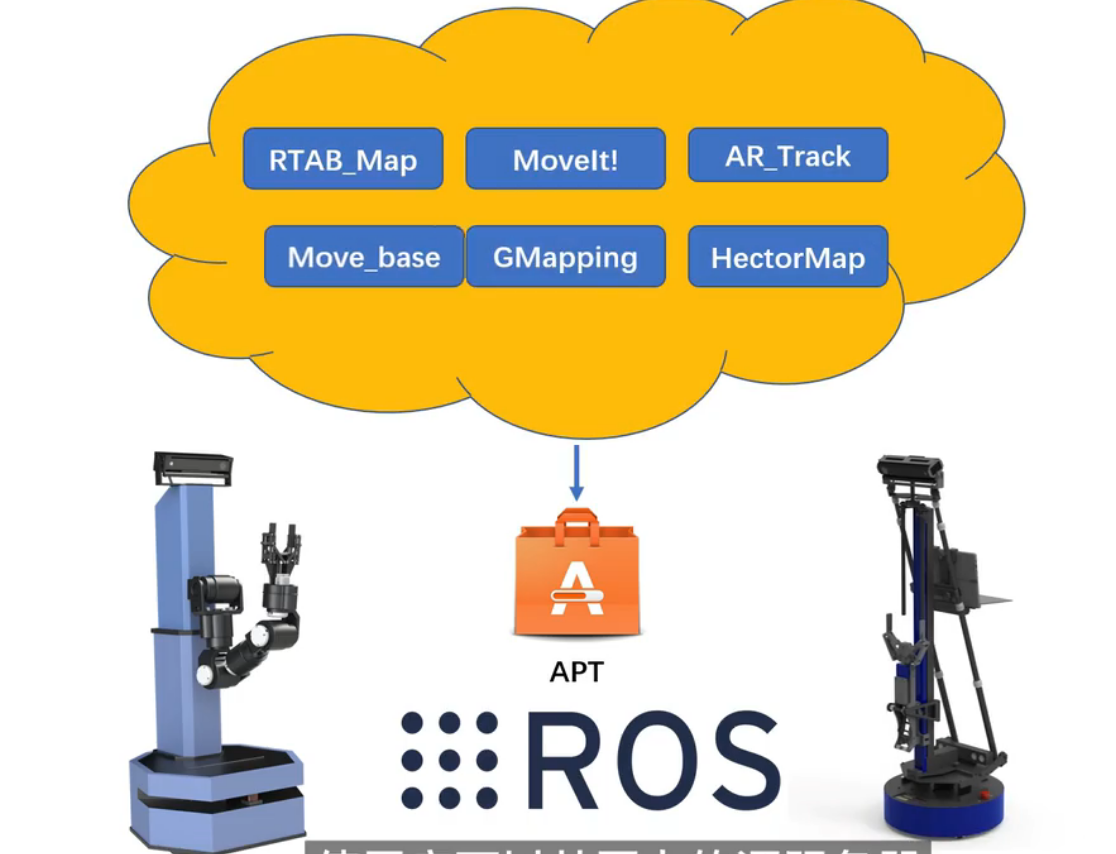
三、ROS应用商店APT源
我们买了一台新手机 回家一般都是先下载 应用软件
所以 ROS安装好以后 我们就可以开始 安装一些应用
APT:Ubuntu自带的一套软件包下载工具
使用APT 可以从网上的 源服务器(也就是北京大学那个)下载制定的软件包并自动安装
整个过程和手机上的应用商店非常相似。
除了 Ubuntu下载后 (时Ubuntu不是ROS)自带的官方应用商店
我们还可以通过编辑APT的源列表增加新的应用商店 比如安装ROS时添加的清华镜像源,就是ROS官方应用商店之一。(包括ROS本身都是从这个应用商店下载安装的)
如何知道ROS的应用商店中还有哪些APP?
ROS Index ROS应用商店
点击PACKAGE LIST ---->NOETIC(选择好版本)
这个列表就是ROS官方商城所有的软件包
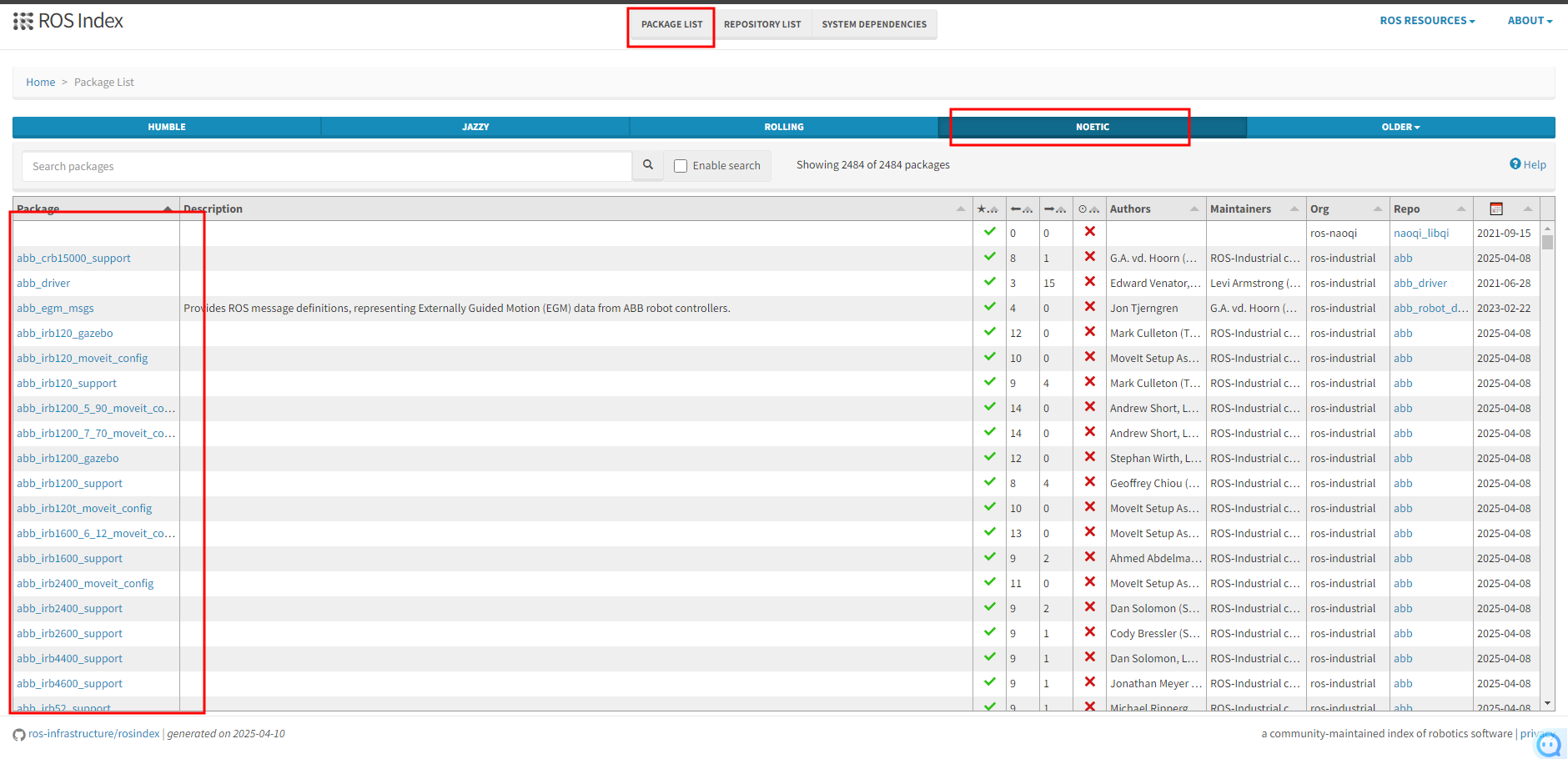
其中1:基础信息
2:源码信息(可以下载后修改源码进行开发)
3:这个应用的具体使用细节
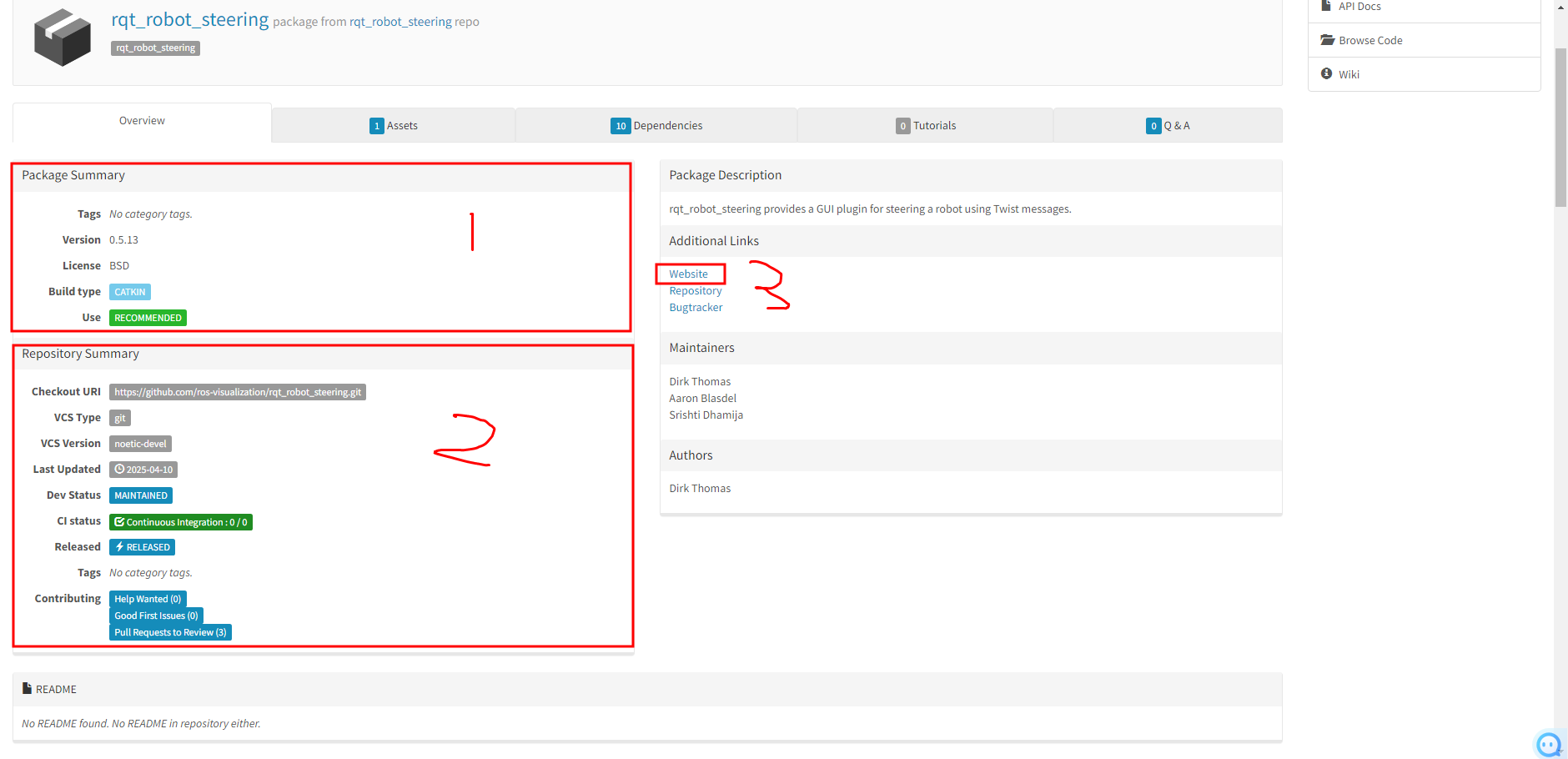
3点进去之后:就会有使用案例和介绍
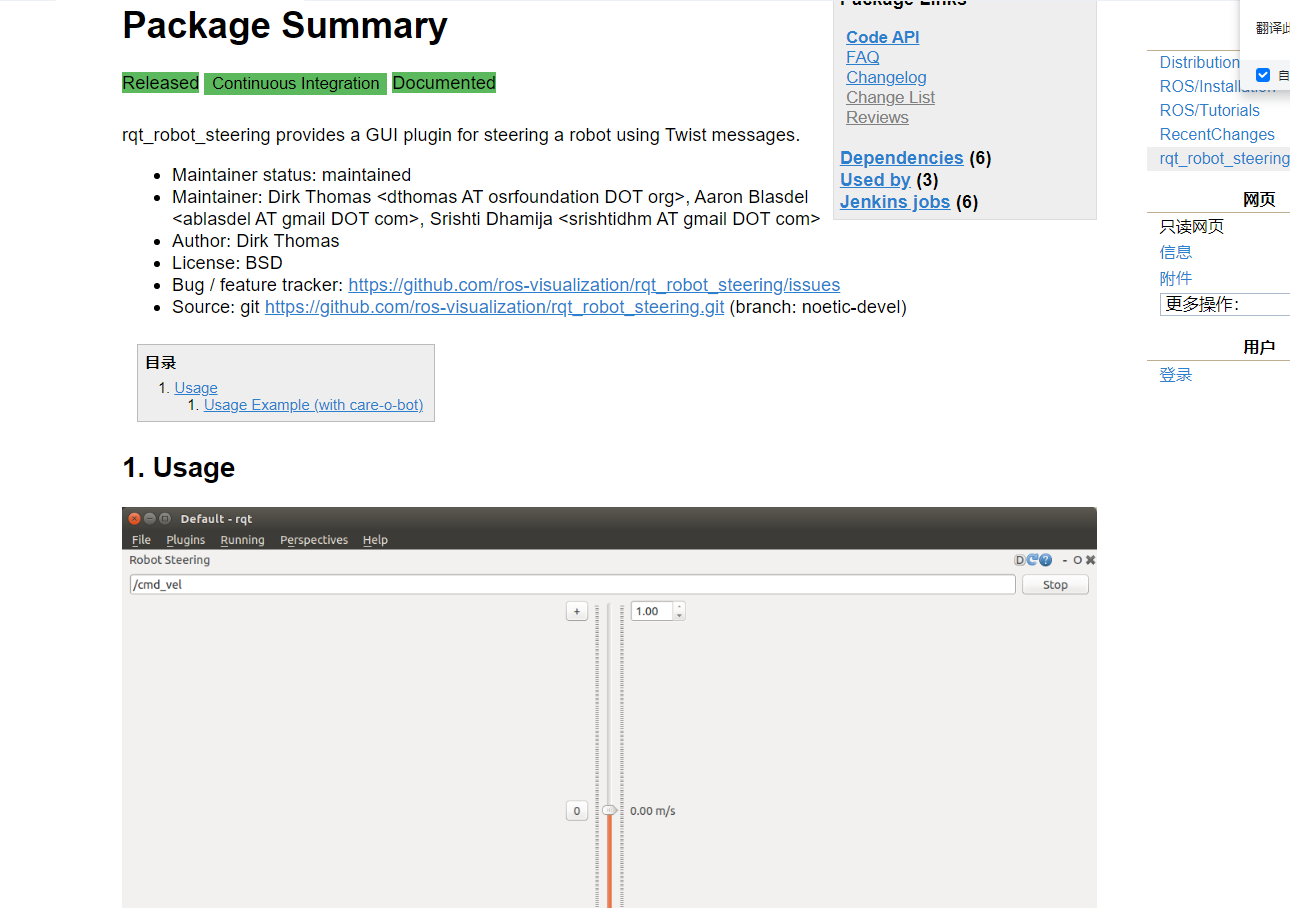
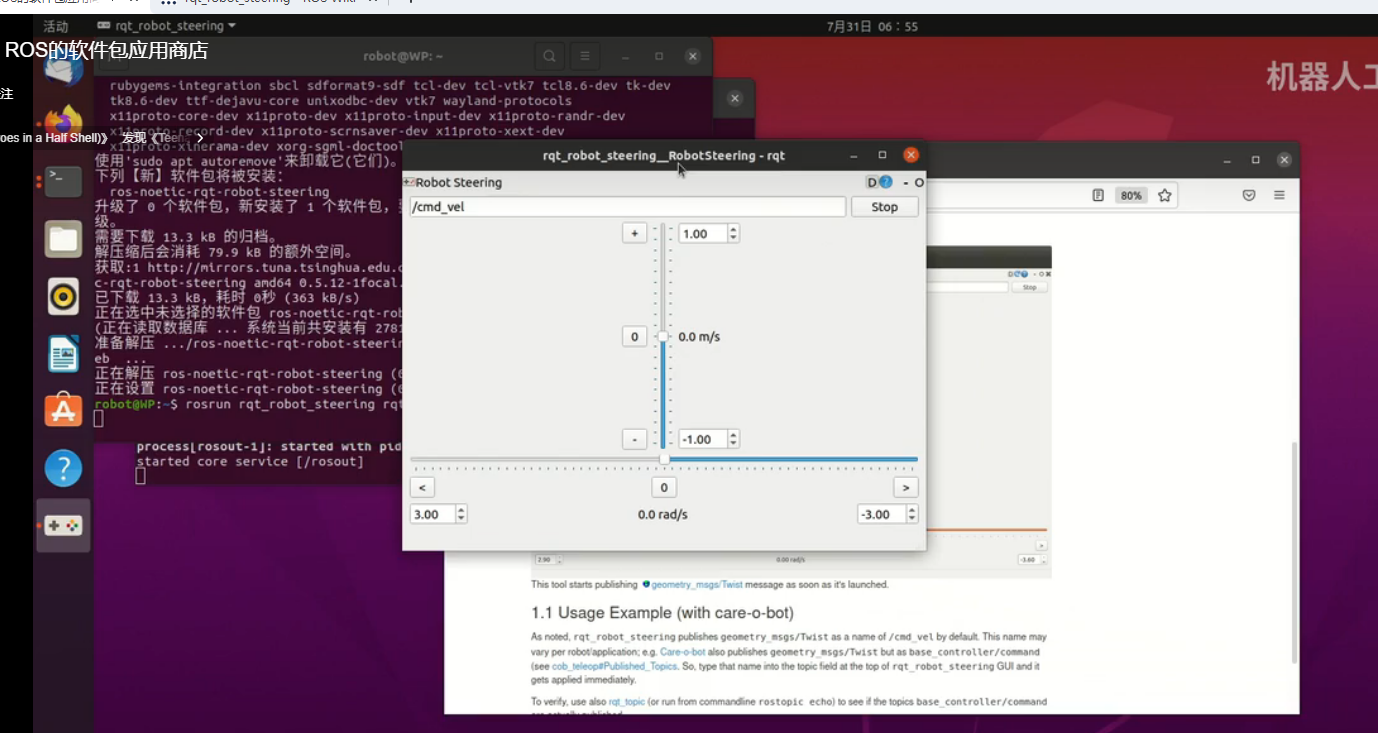
如何在Linux中下载、运行 应用商店的应用 :以 rqt_robot_steering 为例
下载软件:在终端中输入
sudo apt install ros-noetic-rqt_robot_steering
安装好后 我们将这个软件运行起来 运行之前 我们首先得将ROS系统启动起来 软件包是需要ROS核心才能运行的 就像运行安卓的APP就得先让安卓系统运行起来一样
在新的终端中输入:
roscore
这样就启动好了ROS系统
运行程序:
再启动一个新的终端输入:
rosrun rqt_robot_steering rqt_robot_steering
rqt的名称出现了两次 第一次是包的名称 第二次是节点的名称

)



