目录
1 算法原理
1.1 优化模型离散方式
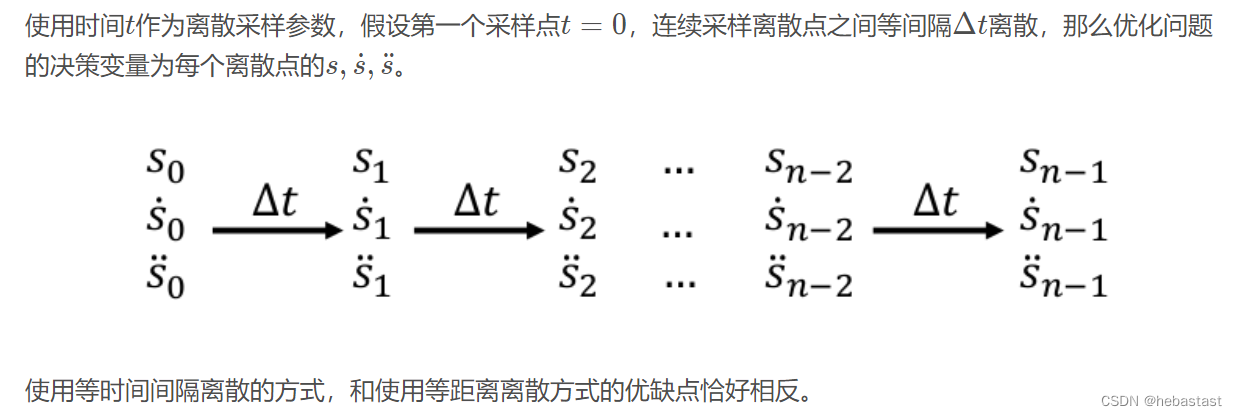
1.1.1 Temporal Parameter Discretization
1.2 优化问题建模
1.2.1 Cost function
1.2.2 Constraints
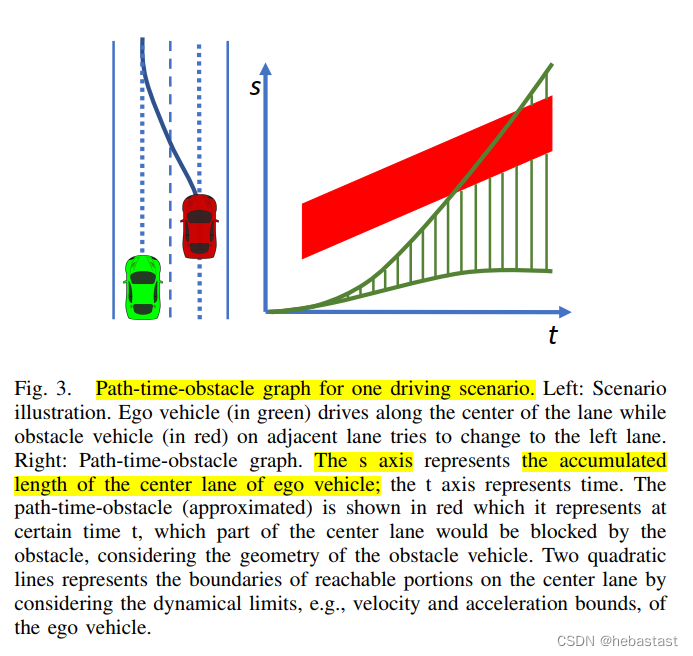
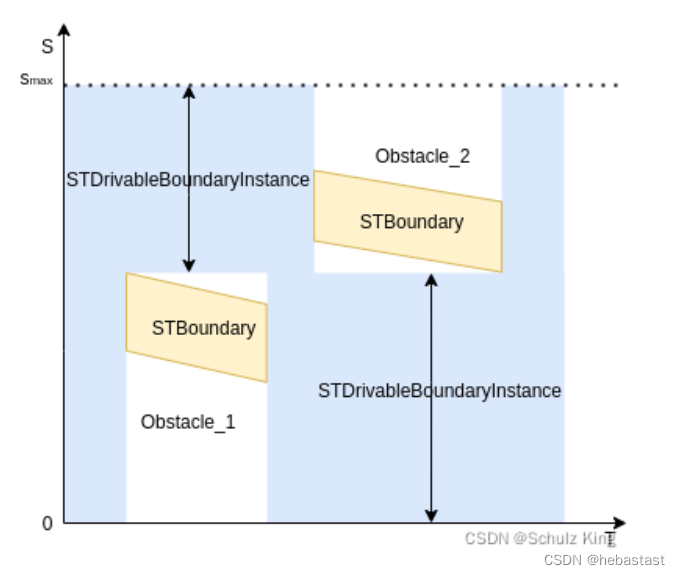
2 ST-Graph
3 代码实现
编辑
3.1 STBoundsDecider
1 算法原理
1.1 优化模型离散方式
在处理最优化问题时,一般会转化成离散形式,将轨迹 s(t) 按照某参数离散,并计算离散点处的约束和 Cost。对于速度规划问题,一般可以按照等间距离散(Spatial Parameter Discretization)和等时间离散(Temporal Parameter Discretization)。
1.1.1 Temporal Parameter Discretization
优点:
缺点:
这条这样理解:
处理方法:
此外,Apollo 还设计了非线性速度规划(就是使用 IPOPT)来处理以上问题。
1.2 优化问题建模
1.2.1 Cost function
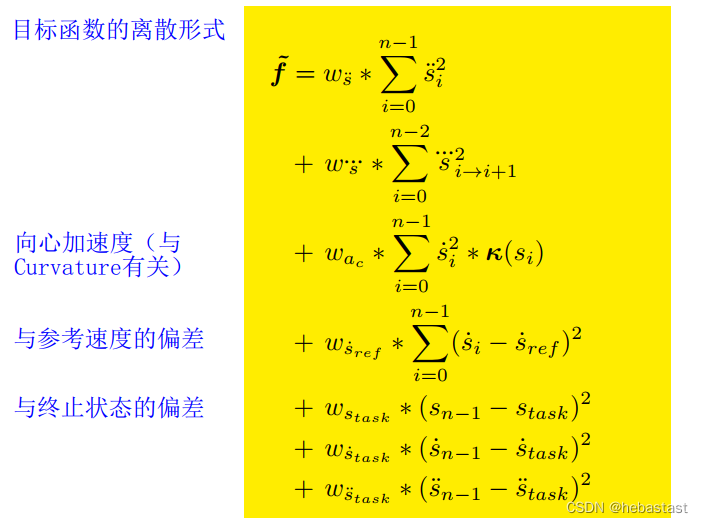
其中:
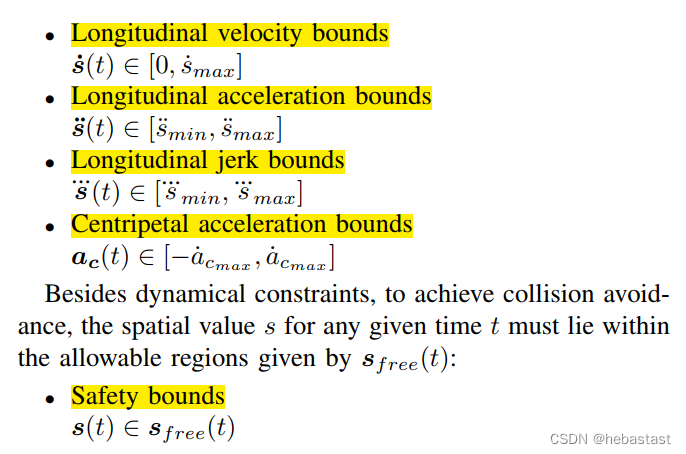
1.2.2 Constraints
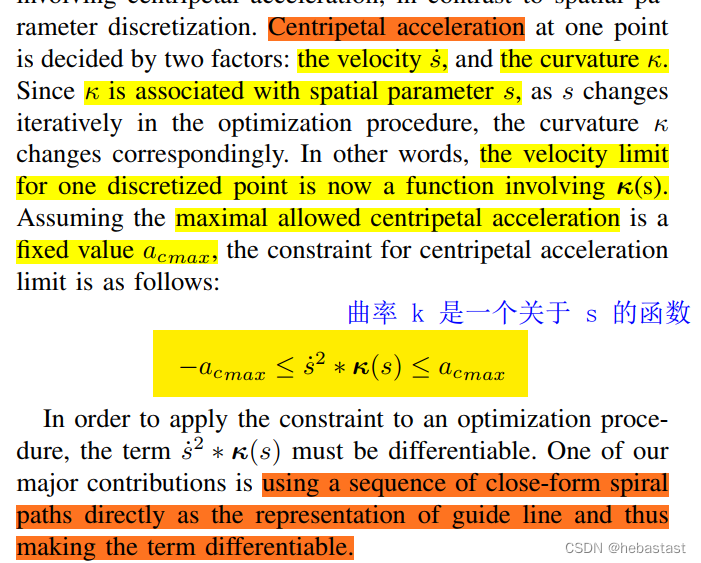
1)不等式约束
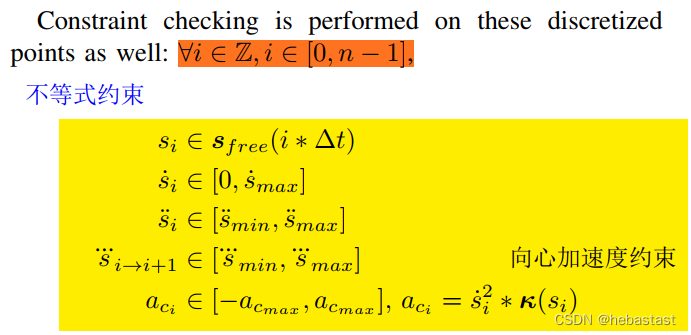
对上面的约束的解释:
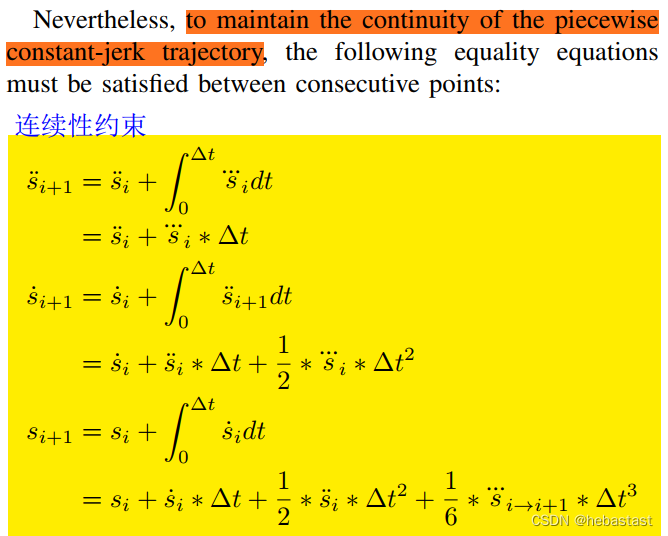
2)等式约束
2 ST-Graph


3 代码实现
在 Apollo 中速度决策规划的实现流程如下:
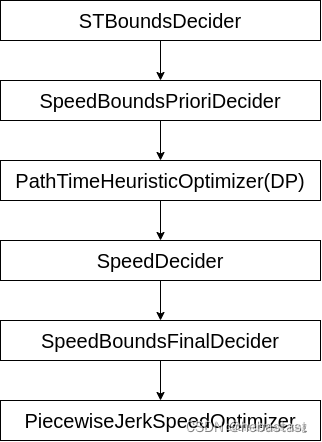
3.1 STBoundsDecider
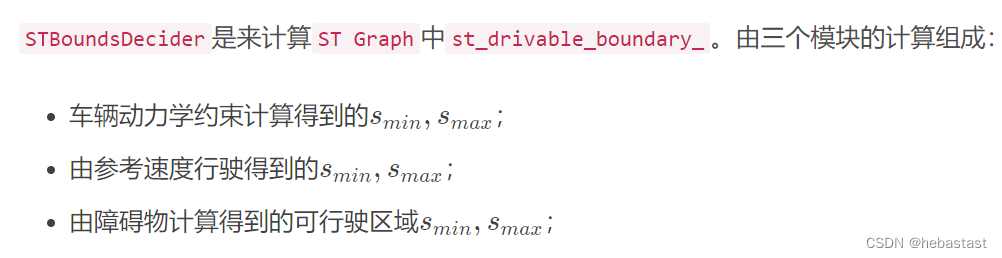
3.1.1 由车辆动力学约束计算得到的行驶范围约束(s_min, s_max)
其计算依据为车辆运动学公式:
3.1.2 由参考速度计算得到的行驶范围约束
3.1.3 由障碍物计算得到的行驶范围约束
3.2 SpeedBoundsPrioriDecider
3.3 PathTimeHeuristicOptimizer
3.4 SpeedDecider
3.5 SpeedBoundsFinalDecider
3.6 PiecewiseJerkSpeedOptimizer
速度规划的优化求解即是按照上述的算法原理实现的。可以看到,在此会依据纵向决策结果生成纵向位移的约束边界,将每个时刻和 cruise speed 的误差作为优化目标的一部分,并且根据 DP 结果在每个时刻处位移的速度约束作为优化问题的速度约束边界,因此将每个时刻的位移和 DP 的位置之差作为了优化目标的一部分,但是这样只能实现速度的软约束。





