Ubuntu20.04本地配置IsaacLab 4.5.0的训练环境(一)
- 配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的./isaaclab.sh --install同样要执行这一步,建议先不执行)
- 配置IsaacSim
- 配置IsaacLab
写在前面,听说IsaacLab 4.2.0有BUG,所以装个4.5.0试试。基本安装步骤和4.2.0一致。
写在前面,需要约200G的空间(因为存在资产包压缩包的下载与解压,同时存在可能会要很大的空间,但实际上用上的只是解压后的文件),如果空间不够的可能需要考虑后面在下载资产包的时候少下载一些,但是只下载部分资产包是否有用无法确定。
写在前面,后续所有的安装,比如conda虚拟环境名称等,你都可以自己指定,并不一定要跟我一样。但要注意相应路径需要修改。
写在前面,下述的安装主要是为了强化学习使用,若只是使用IsaacLab平台,但不一定使用强化学习,不必全部按照下面方式安装。
配置conda虚拟环境(对于这一步,个人感觉跟在配置IsaacLab那一节的./isaaclab.sh --install同样要执行这一步,建议先不执行)
首先确认python版本,torch版本及其cuda版本。对于IsaacLab 4.5.0,需要python3.10,torch2.5.1,而torch2.5.1对应的cuda版本有几个,这可通过pytorch官网确认。

由于本人之前在安装4.2.0时已经配置了cuda12.1,在此直接安装匹配cuda12.1的torch。
启动终端,执行:
conda create -n isaaclab_4_5_0 python=3.10
conda activate isaaclab_4_5_0
conda install pytorch==2.5.1 torchvision==0.20.1 torchaudio==2.5.1 pytorch-cuda=12.1 -c pytorch -c nvidia # 安装pytorch2.5.1
配置IsaacSim
从官网下载IsaacSim 4.5.0安装包(Latest Release中选择4.5.0版本,Linux版本):

在**./local/share/ov/pkg/目录下创建文件夹isaac-sim-4.5.0**,将安装包解压至该文件夹内。

在该文件夹下启动终端,执行:
# 若不是在./local/share/ov/pkg文件夹下isaac-sim-4.5.0中进行文件解压,还需执行一步./post_install.sh
./isaac-sim.selector.sh
出现如下GUI界面(第一次运行可能会出现报错,点击确定即可,对后续使用并没有影响):

点击SATRT即启动IsaacSim,第一次启动会比较慢,等候即可。(Streaming表示不显示界面)
另一种启动方法则是直接在终端中运行:
./isaac-sim.sh
设置环境变量,在终端中执行(或直接鼠标打开):
gedit ~/.bashrc
加入指令:
export ISAACSIM_PATH="${HOME}/.local/share/ov/pkg/isaac-sim-4.5.0" # 这里请跟你解压的路径对应
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
配置IsaacLab
从官网下载IsaacSim Assets,版本4.5.0,三个资产包,若空间足够可全部下载。
在任意位置创建文件夹(比如我则是在home目录下创建了isaaclab文件夹,其中创建了4-5-0子文件夹,后续我都会以这个文件夹来说明,读者根据自己需求进行更改。)
将所有下载的资产包解压至同一文件夹内。
安装依赖:
sudo apt install cmake build-essential
cd ~/.local/share/ov/pkg/
git clone https://github.com/isaac-sim/IsaacLab.git # 一定要拉去最新版的!旧版IsaacLab不适配!出现网络问题无法git clone的可以试试用镜像,git clone https://kkgithub.com/isaac-sim/IsaacLab.git或git clone https://githubfast.com/isaac-sim/IsaacLab.git
cd IsaacLab
gedit isaaclab.sh
在sh文件上方,命令“export ISAACLAB_PATH=“ ( c d " ( cd " (cd"( dirname “${BASH_SOURCE[0]}” )” &> /dev/null && pwd )"”之前添加代码:
source ~/.local/share/ov/pkg/isaac-sim-4.5.0/setup_conda_env.sh
而后,关闭文件,在终端中执行:
source ~/.bashrc
ln -s ~/.local/share/ov/pkg/isaac-sim-4.5.0 _isaac_sim
# 对于下述指令,若没有安装虚拟环境,请执行
./isaaclab.sh --conda my_env # my_env实际上是创建的conda虚拟环境的名称,由读者自行指定,也可不指定,用默认名称isaaclab
# 随后执行
./isaaclab.sh --install # 执行这一步,请确保你已经在conda虚拟环境中
若出现如下报错:
ERROR: Could not find a version that satisfies the requirement rsl-rl (unavailable) (from omni-isaac-lab-tasks[all]) (from versions: none)
ERROR: No matching distribution found for rsl-rl (unavailable)
执行(确保你在conda虚拟环境中):
pip install "git+https://github.com/leggedrobotics/rsl_rl.git"
然后,启动isaaclab,第一次启动会比较费时,要几分钟:
./isaaclab.sh -s
成功后出现界面,顶部显示Isaac Sim Full 4.5.0。
而后,在./local/share/ov/pkg/isaac-sim-4.5.0/apps/isaacsim.exp.base.kit文件中添加(注意把其中的路径都修改为你自己的本地路径):
persistent.isaac.asset_root.default = "/home/<username>/isaacsim_assets/Assets/Isaac/4.5"
exts."isaacsim.asset.browser".folders = ["/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Robots","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/People","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/IsaacLab","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Props","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Environments","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Materials","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Samples","/home/<username>/isaacsim_assets/Assets/Isaac/4.5/Isaac/Sensors",
]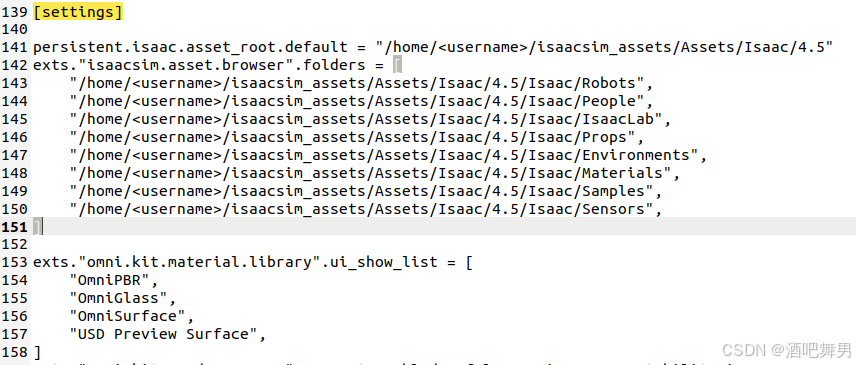在IsaacSim文件夹下执行:
./isaac-sim.sh --/persistent/isaac/asset_root/default="/home/<username>/isaacsim_assets/Assets/Isaac/4.5" # 这里的路径是你自己存放资产的本地路径
若运行过程中除了ROS2报错外无其它错误,点击如图所示的按钮,若显示路径为资产包路径,说明设置成功。
 随后,将IsaacLab文件夹下的
随后,将IsaacLab文件夹下的
NUCLEUS_ASSET_ROOT_DIR = carb.settings.get_settings().get("/persistent/isaac/asset_root/cloud")
修改为你自己的资产包路径:
NUCLEUS_ASSET_ROOT_DIR = "/home/<username>/isaacsim_assets/Assets/Isaac/4.5"

随后在IsaacLab文件夹下运行:
./isaaclab.sh -p scripts/demos/quadrupeds.py
出现如下界面:

)

——主板问题)

-Command(命令)模式)
