视语(DZRT)技术介绍目录
视语(DZRT)介绍
智慧变焦技术
射线追踪技术
一、基本原理
二、实现步骤
三、优化技术
智能框架技术
一、智能框架技术概述
二、智能框架技术的特点
三、应用前景
网格碰撞体优化
1. 使用合适的碰撞层(Layers)和碰撞矩阵(Collision Matrix)
2. 简化网格
3. 使用凸包(Convex Mesh)
4. 使用触发器(Triggers)
5. 自定义碰撞检测
视语大语言模型嵌入
视语(DZRT)介绍
视语(DZRT)技术即智慧变焦(DIGITAL ZOOM)、射线追踪(RAY TRACING)以及智能框架技术。
智慧变焦技术指通过软件层面实现物体对象变焦效果,也就是原本只在支持眼动追踪XR设备(售价1W+)才能使用的功能,通过软件层面实现入门XR设备(2000+)的数字变焦功能,推进XR设备的普及化。
射线追踪技术指通过自研collider生成技术实现物体可以被动态高精度检测。在AR程序中配合智慧变焦技术可以实现AR识别精度提高50%,用户交互误判率降低80%。
智能框架技术即集成智慧变焦技术、射线追踪技术、基础框架。开发者用户使用DZRT技术的官方载体,智能框架拥有剔除脚本、有效提高轻量级开发的能力。
攻破传统需要运动追踪摄像头才能使用变焦技术(无追踪摄像头的设备会使用注视点渲染,眼睛周围画面渲染质量极低),通过智慧变焦技术我们首次在软件层面实现了根据用户内容移动范围实时更改渲染精度,使得用户注视的方向90%能够正确的清晰渲染,因为当前的菲尼尔透镜限制,在镜片物理层面的外围画面我们进行特殊数字影像增强处理,使得外围画面的解析度增强50%+
目前市场上所有引擎因为当前性能限制,动态碰撞体检测会计算出大概粗略模型,精度非常的低,静态模型精度高但是无法进行动态交互碰撞、当出现有大型拐角时会默认求成三角形判断范围,模型贴合率仅有60%左右。我们在代码层面攻破了collider生成能力,使得性能大量的被释放,加上自研贴合算法,使得对象能够达到99%的动态检测能力,在硬件层面进行采样点计算,AR与MR应用的识别能力提高50%
通过内构脚本程序,将大量繁杂的程序进行内置化,开发者仅需将场景对象拖入脚本中,修改数值即可实现相应的效果。在UI层面内置的架构可以直接生成多端交互系统,大大减轻了开发者压力、减少大量不必要的时间浪费,将开发精力着重与程序本身。并且还集成了前面两种技术,最终用户如果将采用我们技术,只需使用我们的智能框架即可。轻量级XR应用开发效率提升80-90%左右,效率极大提高
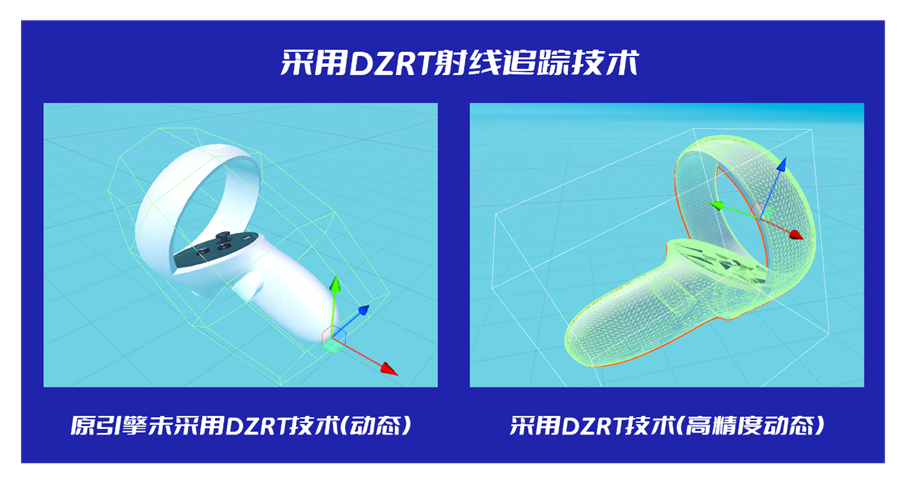
在开发者启用Enable GPU Instancing的条件下配合Nvidia GPU与NPU能够最大程度释放性能,启用 DZRT技术将会得到高精度动态collider,此时在在空间坐标中投射一条直线到碰撞体将会有高精度检测结果(绿色网格为碰撞体范围,DZRT技术在高精度的同时保证了性能)

DZRT技术不仅仅可以运用于工程内,在硬件层面数字变焦技术拥有增强摄像头能力,摄像头将捕捉的画面传回到后台,后台将会进行增强处理。也就是能实现在照片还会清晰对焦下就能直接识别,将识别延迟控制在8-10ms内,并且使用多点采样算法提高模型定位的精确度和稳定度
智慧变焦技术
对于VR环境中的物体进行基于距离的图像增强,通常不会直接在渲染管线上进行像素级的操作(这通常需要Shader编程),而是可以通过调整物体的材质、光照或者通过脚本动态改变其属性来实现。而智慧变焦技术不仅采用对在渲染管线上进行像素级的操作还对处理完成后的图像以及物体材质进行调整。附上部分实现代码
using UnityEngine; public class DistanceBasedMaterialEnhancer : MonoBehaviour
{ public Material targetMaterial; // 目标材质 public float maxDistance = 10.0f; // 最大距离 public float maxShininess = 1.0f; // 最大光泽度 public float minShininess = 0.1f; // 最小光泽度 void Update() { if (targetMaterial == null) return; // 获取物体到Camera(玩家视角)的距离 float distance = Vector3.Distance(transform.position, Camera.main.transform.position); // 根据距离计算光泽度 float shininess = Mathf.Lerp(minShininess, maxShininess, 1 - (distance / maxDistance)); // 更新材质的光泽度属性(假设材质有这样一个属性) // 注意:大多数标准Shader不直接暴露'shininess'属性,这里仅为示例 // 你可能需要自定义Shader或使用已有的具有可调节光泽度属性的Shader if (targetMaterial.HasProperty("_Shininess")) { targetMaterial.SetFloat("_Shininess", shininess); } else { Debug.Log("Material does not have a '_Shininess' property."); } }
}在AR、MR处理上采用卷积神经网络(Convolutional Neural Networks,CNN)(CNN是计算机视觉中最重要的算法之一。它通过模拟人脑的视觉系统,能够实现图像分类、目标检测等任务。CNN通过多层卷积和池化层来提取图像的特征,并通过全连接层进行分类。)
射线追踪技术
一、基本原理
射线追踪的基本原理是从摄像机的位置向屏幕上的每个像素发射一条或多条射线,然后计算这些射线与场景中物体的交点,并根据交点处的材质属性、光源位置等因素计算光线的反射、折射、阴影等效果,最终合成出图像。
二、实现步骤
- 射线生成:
- 对于屏幕上的每个像素,从摄像机的位置发射一条或多条射线。这些射线的方向由像素在屏幕上的位置决定,并考虑到摄像机的视场角(FOV)和焦距等参数。
视语在基本的抛物线方法上改进得到更好的求距方法。

- 场景相交检测:
- 将每条射线与场景中的物体进行相交检测。这通常通过空间分割技术(如八叉树、KD树等)来加速相交检测过程,以减少不必要的计算量。
- 交点处理:
- 一旦射线与某个物体相交,就根据交点处的材质属性(如颜色、反射率、折射率等)和光源位置来计算光线的行为。这可能包括反射、折射、阴影等效果的计算。
- 递归追踪:
- 对于反射和折射光线,可以递归地继续追踪它们的路径,直到达到一定的深度或满足其他停止条件。
- 着色与合成:
- 根据所有射线的计算结果,对每个像素进行着色,并将着色结果合成到最终的图像中。
三、优化技术
- 重要性采样:
- 通过优先追踪对最终图像贡献较大的光线(如直接来自光源的光线、反射和折射光线等)来提高渲染效率。
- 光线追踪加速结构:
- 使用空间分割技术(如BVH、KD树等)来组织场景中的物体,以便快速进行相交检测。
- 去噪与抗锯齿:
- 由于射线追踪算法本身可能产生噪声和锯齿效应,因此需要使用去噪技术和抗锯齿算法来改善图像质量。
- 并行计算:
- 利用现代计算机的多核处理器和GPU等并行计算资源来加速射线追踪过程。
智能框架技术
一、智能框架技术概述
智能框架技术是一种集成了多种先进技术的软件开发框架,旨在提高开发效率、优化应用性能,并支持智能场景的实现。它可能包括但不限于以下几个关键组成部分:
- 基础框架:
- 提供了一套标准的接口、特性库和工具包,用于算法模型的设计、训练和验证。
- 集成了算法的封装、数据的调用以及计算资源的使用,面向开发者提供开发界面和高效的执行平台。
- 智慧变焦技术:
- 这是一种图像处理或视觉识别技术,能够根据需要调整图像的焦点或视野范围,以更精确地捕捉和分析目标信息。
- 在智能框架中,智慧变焦技术用于优化图像识别、视频分析等应用场景的性能。
- 射线追踪技术:
- 射线追踪是一种用于模拟光线在三维空间中传播路径的技术,广泛应用于计算机图形学、物理模拟等领域。
- 在智能框架中,射线追踪技术用于实现更真实的渲染效果、物理模拟等,提升应用的视觉体验和交互性。
- DZRT技术:
- 专门设计用于智能框架的底层技术或架构。
- 该技术提供了优化的数据处理、计算资源分配等功能,以支持智能框架的高效运行和智能场景的实现。
二、智能框架技术的特点
- 剔除脚本:
- 智能框架提供了自动化的脚本剔除功能,以减少不必要的代码和计算开销,提高开发效率和应用性能。
- 轻量级开发:
- 通过集成多种先进技术和优化工具,智能框架能够显著降低开发难度和成本,支持快速迭代和部署。
- 离线大模型支持:
- 智能框架支持离线大模型的部署和运行,使得开发者能够在没有网络连接的情况下也能利用大模型的强大能力进行智能场景的实现。
- 智能场景实现:
- 借助智慧变焦、射线追踪等先进技术,智能框架能够支持各种复杂的智能场景实现,如智能监控、自动驾驶、虚拟现实等。
- 代码辅助:
- 智能框架提供的代码自动生成、补全或优化等辅助功能,以进一步降低开发门槛和提高开发效率。
三、应用前景
智能框架技术作为一种集成了多种先进技术的软件开发框架,具有广泛的应用前景。它可以应用于各种需要智能处理能力的领域,如智能制造、智慧城市、智能医疗等。随着人工智能技术的不断发展和普及,智能框架技术有望成为未来软件开发的重要趋势之一。
网格碰撞体优化
在Unity中,网格碰撞体(Mesh Collider)的优化通常涉及到减少碰撞计算的复杂度和提高性能。由于Mesh Collider相比其他类型的碰撞体(如Box Collider, Sphere Collider等)在性能上更为昂贵,因为它需要处理更复杂的几何形状,所以优化尤其重要。
以下是视语优化Mesh Collider性能的策略以及相应的Unity C#代码(非核心部分代码):
1. 使用合适的碰撞层(Layers)和碰撞矩阵(Collision Matrix)
通过合理配置碰撞层和碰撞矩阵,可以减少不必要的碰撞检测,从而提高性能。
示例:设置两个物体的碰撞层,并确保它们的碰撞矩阵设置为不相互碰撞。
在Unity的Inspector中设置,或通过脚本动态设置:
// 设置物体的碰撞层
gameObject.layer = LayerMask.NameToLayer("MyCustomLayer"); // 动态设置碰撞矩阵
Physics.IgnoreLayerCollision(LayerMask.NameToLayer("MyCustomLayer"), LayerMask.NameToLayer("AnotherLayer"));2. 简化网格
简化模型的网格可以减少碰撞检测的计算量。可以使用建模工具(如Blender, Maya等)来减少多边形数量。
注意:这不是Unity C#代码,但这是一个重要的优化步骤。
3. 使用凸包(Convex Mesh)
DZRT视语将Mesh Collider设置为Convex(凸的)。这会使碰撞检测更加高效,因为Unity可以使用更简单的算法来检测碰撞。但是,请注意,只有完全凸的网格才能被设置为Convex。
在Unity的Inspector中设置,或通过脚本:
MeshCollider meshCollider = GetComponent<MeshCollider>();
if (meshCollider != null) { meshCollider.convex = true; // 注意:仅当网格确实是凸的时才设置为true
}4. 使用触发器(Triggers)
碰撞的物理效果(如反弹、摩擦等),只关心碰撞事件,DZRT视语将Mesh Collider设置为触发器。这可以减少碰撞计算的复杂性。
MeshCollider meshCollider = GetComponent<MeshCollider>();
if (meshCollider != null) { meshCollider.isTrigger = true;
} // 然后,使用OnTriggerEnter, OnTriggerStay, OnTriggerExit来处理碰撞事件
void OnTriggerEnter(Collider other) { // 碰撞检测代码
}5. 自定义碰撞检测
对于极端情况,Mesh Collider的性能仍然成为瓶颈,DZRT技术实现自定义的碰撞检测逻辑,这通常涉及射线检测(Raycasting)或更复杂的几何算法。
视语大语言模型嵌入
视语采用自然语言处理(NLP)中的序列到序列(Seq2Seq)模型等模型结构。以下为简化后的视语核心代码块:
import tensorflow as tf
from tensorflow.keras.layers import Input, Embedding, LSTM, Dense, TransformerEncoder, TransformerEncoderLayer
from tensorflow.keras.models import Model vocab_size = 10000000
embedding_dim = 256
# Transformer层数
num_heads = 8
transformer_units = 512
encoder_layers = [ TransformerEncoderLayer( num_heads=num_heads, units=transformer_units, dropout=0.1 ) for _ in range(2)
] # 输入层
inputs = Input(shape=(None,)) # 嵌入层
embedding_layer = Embedding(vocab_size, embedding_dim)(inputs) transformer_encoder = TransformerEncoder(encoder_layers, return_sequences=True, return_state=True)
encoder_output = transformer_encoder(embedding_layer) decoder_dense = Dense(vocab_size, activation='softmax')
decoder_output = decoder_dense(encoder_output) # 定义模型
model = Model(inputs=inputs, outputs=decoder_output) # 编译模型(这里使用交叉熵损失函数和Adam优化器)
model.compile(optimizer='adam', loss='sparse_categorical_crossentropy') # 模型概述
model.summary() # 注意:这里我们没有训练数据,也没有进行训练过程。
# 在实际应用中,你需要准备代码数据的编码(tokenization),训练集,验证集等。通过视语(DZRT)技术的官网,用户可以轻松对接丰富的开发资源。官网不仅提供了详尽的技术文档、API接口说明以及开发指南,还设有专门的开发者社区,供开发者交流经验、分享心得、解决难题。此外,官网还定期发布最新的技术更新、产品迭代信息以及成功案例分享,帮助开发者紧跟技术前沿,了解市场需求,从而更好地应用和优化视语(DZRT)技术。
在开源共享的理念下,视语(DZRT)技术鼓励并支持开发者基于其核心技术进行二次开发、创新应用。通过提供开放的源代码、模块化的组件以及灵活的配置选项,视语(DZRT)技术使得开发者能够根据自己的需求快速搭建起符合特定场景的应用系统。同时,视语(DZRT)技术还积极与全球范围内的开源社区、技术论坛以及行业协会等建立合作关系,共同推动XR扩展现实技术的普及与发展。





