一、普通双目相机测距原理
普通双目相机具有如下特点:左右两个相机位于同一平面(光轴平行),且相机参数(焦距f)一致。其原理图如下:
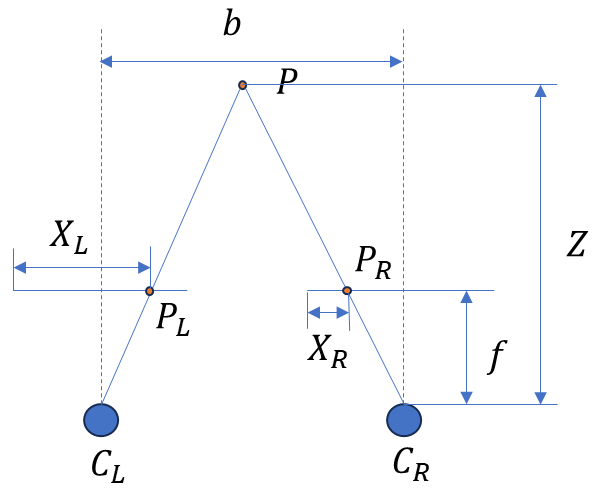
如图所示,P点为相应的物体位置,CL和CR为左右相机光心位置,PL和PR分别为左相机和右相机拍摄的P点成像结果。f为相机焦距,Z为物体距相机的深度距离,b为左右相机基线距离
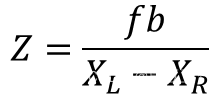
根据几何关系有:
![]()
则相应的深度信息计算公式为:
 (1)
(1)
其中XL-XR为视差。
其余在两侧的情况同样可以用几何关系分析得到该表达式(1),即对于普通双目相机测距可以直接通过公式(1)得到深度结果。
二、交互式双目相机测距原理
此处图片与原理计算引用自论文:
[1]张恒康,何玉明,张耿耿,等.一种单相机测量三维运动轨迹的方法[J].固体力学学报,2010,31(S1):171-176.DOI:10.19636/j.cnki.cjsm42-1250/o3.2010.s1.029.
如图所示,P点为相应的物体位置,Oc1和Oc2为相机位置,对应相应的相机坐标系{c1}和{c2}.
P1和P2分别为左相机和右相机拍摄的P点成像结果。
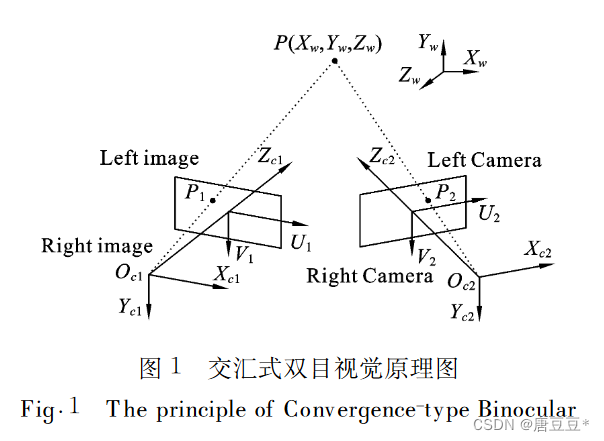
P1在相机坐标系下的坐标为[u1,v1];P2在相机坐标系下的坐标为[u2,v2];P在{c1}下的坐标为[Xc1,Yc1,Zc1];P在{c2}下的坐标为[Xc2,Yc2,Zc2];f1,f2为相距
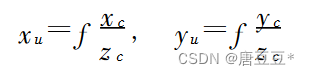
则可以获得图像坐标与相机坐标的关系如下:
进一步,可以转化为矩阵关系,此时相应的u,v单位转化为像素:
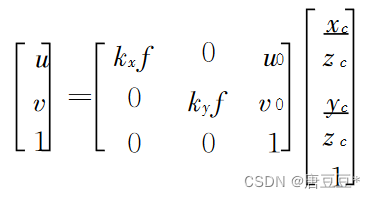
其中,kx和ky表示的是相平面内单位长度对应的像元数
同时,可以获得相机坐标与世界坐标的转换关系式:

其中:R表示世界坐标相对于相机坐标的旋转矩阵,T表示世界坐标相对于相机坐标的平移矩阵。



)
)
所有权 Stack vs Heap)