Contact-Rich Robot Manipulation Task涵盖了多种需要机器人与环境或物体进行密切接触的复杂操作。
1. Grinding(研磨)
- 任务描述:研磨是制造业中常见的加工过程,涉及使用研磨工具去除材料表面的一层或多层,以达到预定的形状、尺寸或表面光洁度。在机器人研磨任务中,机器人需要精确控制其末端执行器(如研磨头)的运动,以确保在工件上施加正确的力和速度。
- 挑战:
- 精确控制:研磨需要高度的精确性,以避免对工件造成不必要的损伤或改变其形状。
- 环境感知:机器人需要能够感知其周围环境,包括工件的位置、形状和表面条件,以便做出适当的调整。
- 动态适应:由于工件表面条件和研磨头磨损的变化,机器人需要能够动态调整其控制策略。
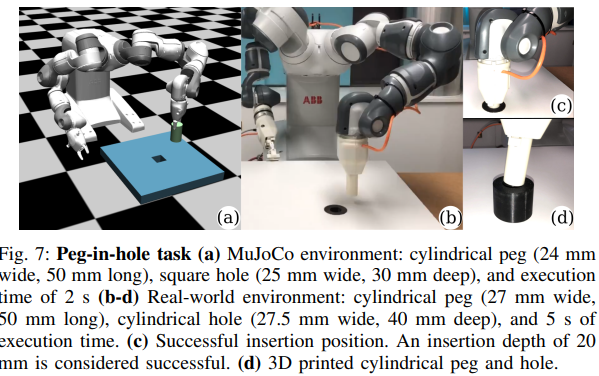
2. Peg-in-Hole Assembly(销孔装配)
- 任务描述:销孔装配是一种典型的装配任务,涉及将一个销(peg)插入一个孔(hole)中。这个任务看似简单,但实际上需要高度的精确性和柔顺性,因为销和孔之间的对准可能受到多种因素的影响,如制造误差、环境干扰和机器人控制精度等。
- 挑战:
- 对准问题:由于销和孔之间的微小差异,机器人需要能够精确地调整其末端执行器的位置和姿态,以确保销能够顺利地插入孔中。
- 柔顺性:在装配过程中,机器人需要具有一定的柔顺性,以应对可能的碰撞和阻塞。
- 环境不确定性:制造误差、环境变化(如温度、湿度)等因素可能导致销孔装配任务的复杂性增加。
3. 解决方案和技术
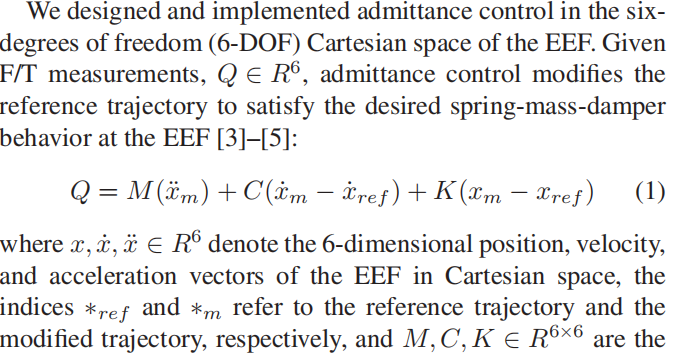
- 精确控制:通过使用先进的机器人控制技术(如阻抗控制、强化学习等),可以提高机器人的精确性和柔顺性。
- 环境感知:利用视觉传感器、触觉传感器等设备,机器人可以感知其周围环境的变化,并做出适当的调整。
- 学习和适应:通过在线学习和适应策略,机器人可以逐步优化其控制策略,以适应不同的环境和任务需求。
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9830834![]() https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9830834
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9830834
SIMULATION TO REAL TRANSFER (SIM2REAL)
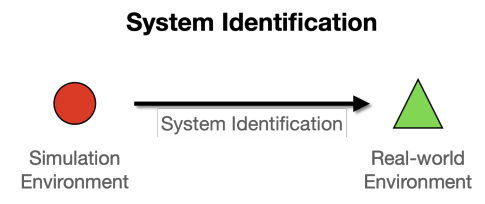
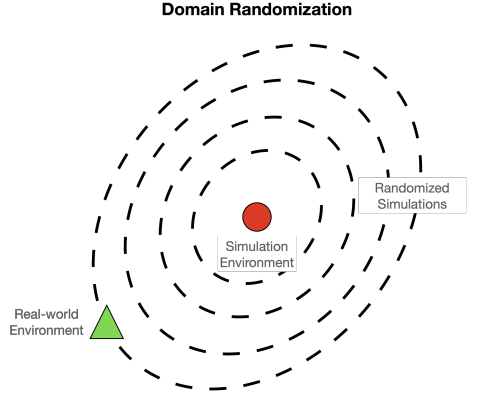
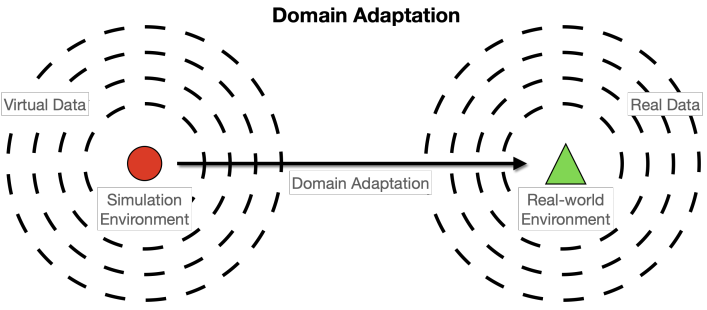
for Contact-rich Manipulation


——————————————————————————————————————————

————————————————————————————————————————


概述——从AWS开始)
)




