目录
- 效果一览
- 基本介绍
- 程序设计
- 参考文献
效果一览
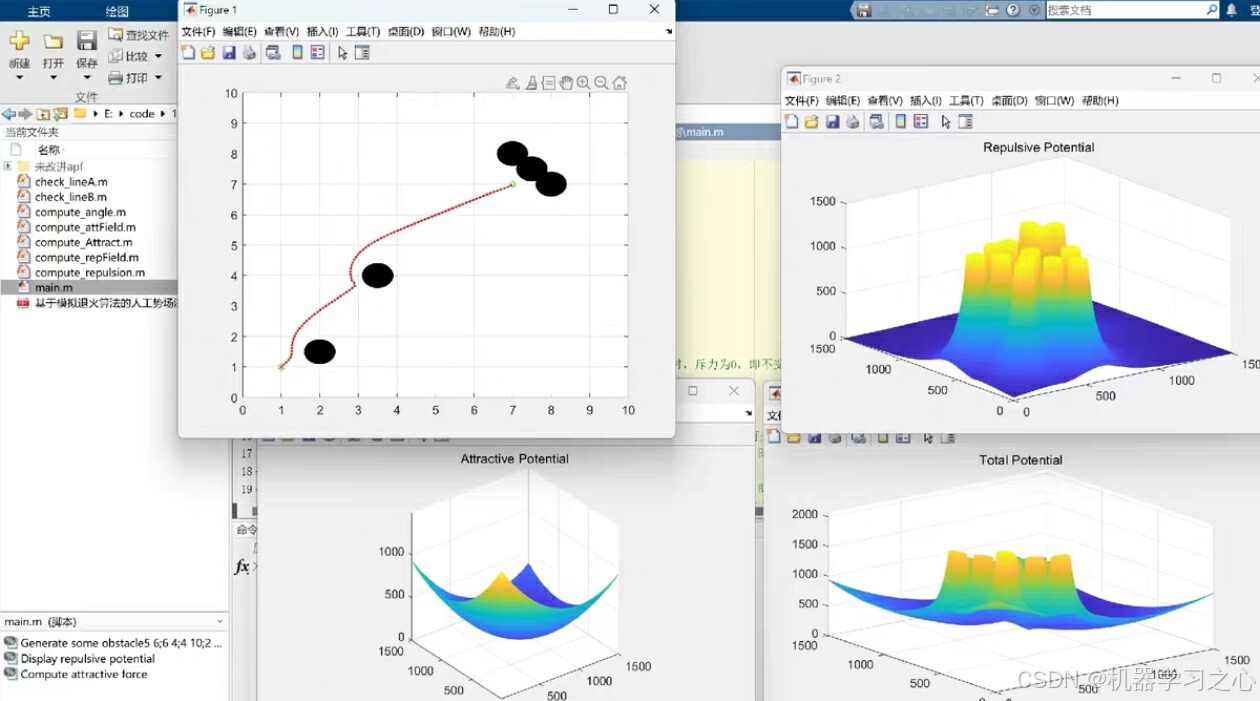
基本介绍
改进的人工势场法(APF)路径规划算法
在路径规划中,人工势场法(APF)是一种常见的方法,但传统的APF算法容易陷入局部极小值,导致路径规划失败。为了克服这些问题,我们可以通过改进斥力函数和引入模拟退火算法来优化APF算法。
改进斥力函数
传统的斥力函数通常只在障碍物附近产生斥力,并且随着距离的增加而迅速减小。为了克服局部极小值问题,我们可以调整斥力函数,使其在更远的距离上仍能产生一定的斥力,同时保持近距离处的斥力足够强,以避开障碍物。
引入模拟退火算法
模拟退火算法是一种基于概率的优化算法,它模仿了金属退火的过程。在路径规划中,我们可以利用模拟退火算法来接受一些比当前路径稍差的解,以避免陷入局部极小值。通过逐渐降低接受较差解的概率,算法最终能够收敛到一个较好的解。
程序设计
- 完整源码和数据私信博主回复路径规划 | 改进的人工势场法APF算法进行路径规划(Matlab)
function unimproved_apf()% Parametersstart_pos = [0, 0]; % Starting positiongoal_pos = [10, 10]; % Goal positionobstacles = [3, 3; 5, 5; 7, 7]; % Obstacle positions (can be multiple)map_size = [20, 20]; % Map sizerho = 5; % Influence distance of obstacleseta = 1; % Attractive coefficientk = 50; % Repulsive coefficientstep_size = 0.5; % Step size for movementmax_iter = 500; % Maximum iterations% Create potential fieldsattractive_field = zeros(map_size);repulsive_field = zeros(map_size);[X, Y] = meshgrid(1:map_size(1), 1:map_size(2));% Calculate attractive fieldattractive_field = eta * sqrt((X - goal_pos(1)).^2 + (Y - goal_pos(2)).^2).
参考文献
[1] 基于人工势场结合快速搜索树APF+RRT实现机器人避障规划附matlab代码
[2] 基于蚁群算法求解栅格地图路径规划问题matlab源码含GUI

)


