Demo.exe讲解
1. Left、Right: 常规的左右相机视野;
与之相似的
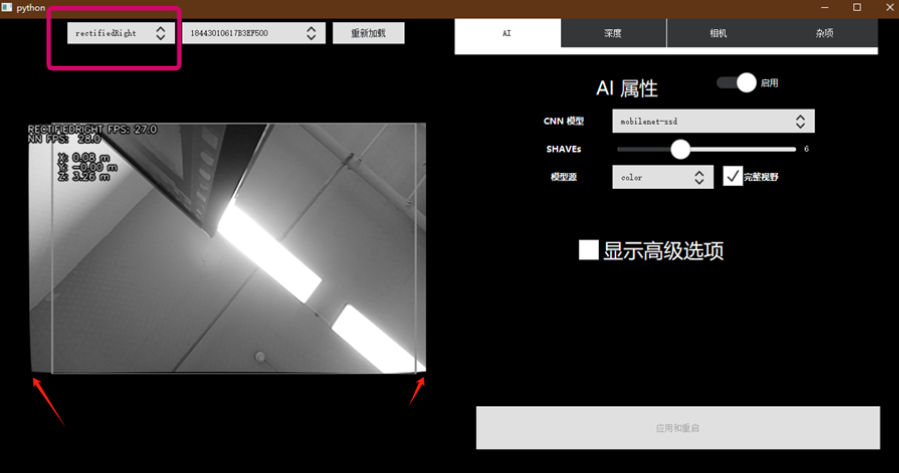
2. Rectifiedright(Rectifiedleft): 纠正畸变后的左右相机视野
通常使用广角镜头或鱼眼镜头时,由于其宽广的视角,图像边缘容易出现畸变;远距离拍摄也容易造成透视畸变。因此在广角镜头(FOV>100°)和OAK-D-LR远距离成像时使用Rectifiedright,效果明显。但在短距离、常规镜头拍摄时候,可能会有反作用哦;
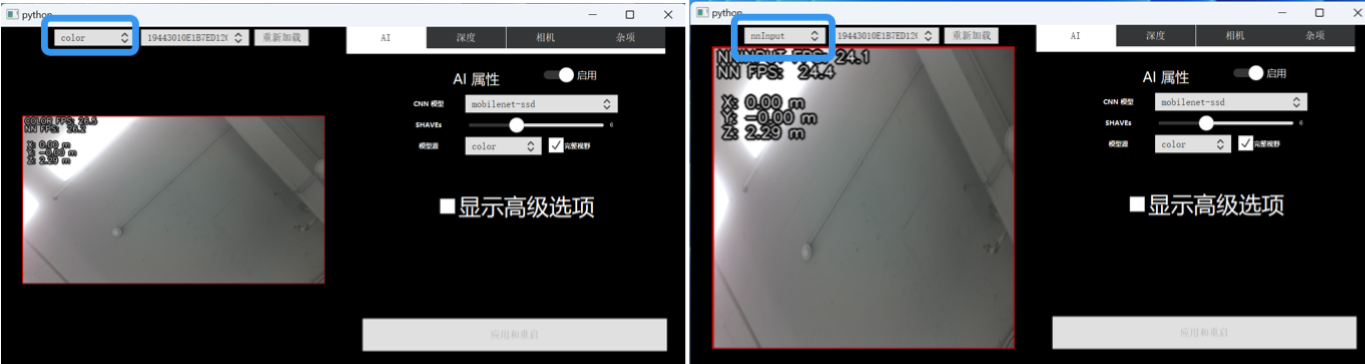
3. NNinpt:用于推理的实际图片
可以看到同一位置的选择color和nninpt下产生的不同结果。nninpt能选择出实际需要推理的图像部分。
4. Depth :经过处理的深度信息,将RGB色彩附着在原始深度图depthraw上可用色彩直观显示深度;
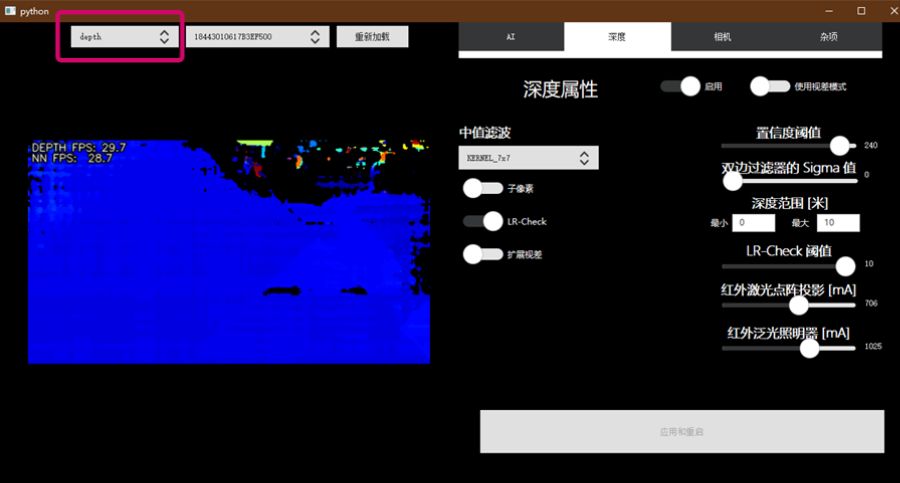
5. Depthraw:未经处理的深度信息:

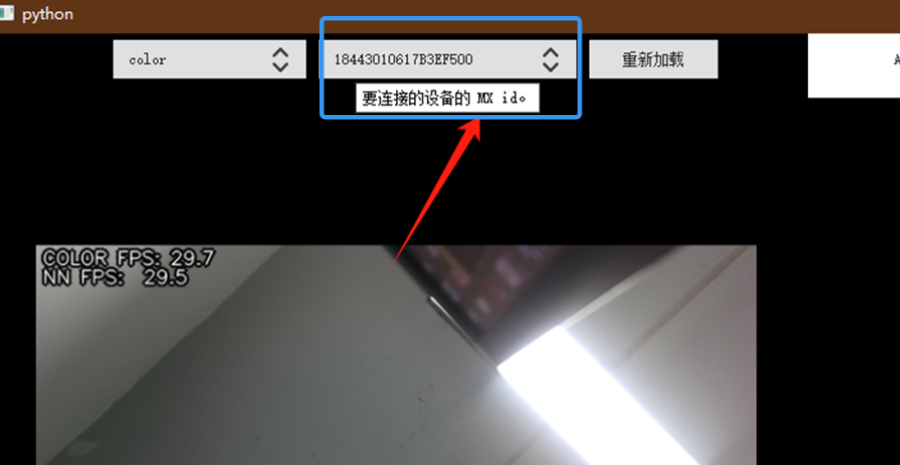
6. MX ID:相机板载的AI芯片的ID号;
AI部分:
1. Ai属性 启用:是否进行ai功能
启用(圆球在右边):相机拍摄的同时启动AI相关功能计算,并显示;
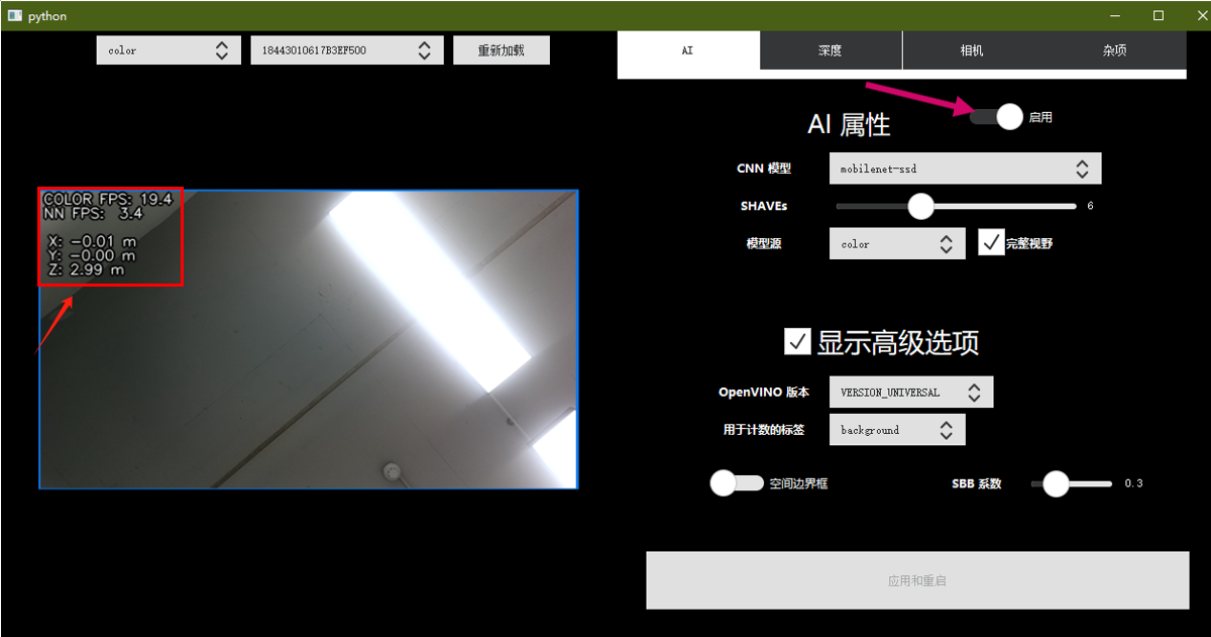
关闭(圆球在左边):仅使用相机拍摄,无任何AI数据处理及显示;

2. AI属性下的相关功能

Cnn模型:Convolutional Neural Networks, CNN,卷积神经网络模型;
Shaves:板载视觉AI处理芯片的计算单元,最高有16个可编程的128位VLIW矢量处理器。可以灵活运用多个并行成像和视觉应用程序管道;
Openvino: OpenVINO 是英特尔开发的跨平台深度学习工具包, 专注于通过面向英特尔硬件平台的一次写入、随处部署的方法优化神经网络推理。OpenVINO 提供集成功能来加快应用程序和解决方案的开发,这些应用程序和解决方案使用计算机视觉、自动语音识别、自然语言处理(NLP)、推荐系统、机器学习等解决多项任务;
用于计数标签:选择某一个预训练模型进行识别并计数;
如下图中选择了chair(椅子)标签并显示椅子的个数。

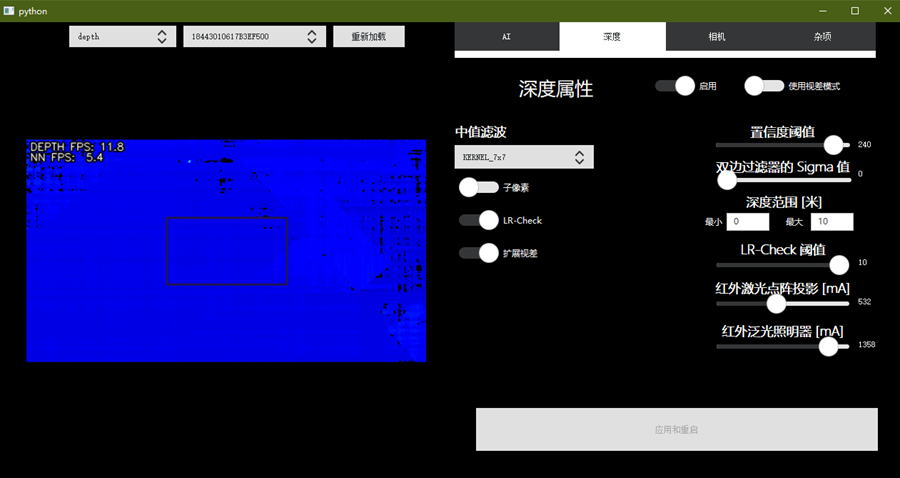
深度部分:
1. 启用:开启深度信息(和计算、显示)
视差模式:双目深度基于视差法原理进行计算,关闭视差模式后,通过对深度信息的像素点“投射”到色彩空间,实现对深度信息的色彩显示;
demo客户端中开启视差模式,则不会显示出具有色彩的深度信息,

关闭后则可以更直观地由色彩信息判断出图像深度信息;

2. 深度属性下的相关功能

中值滤波:一种非线性平滑技术,它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值,从而消除孤立噪点;
Kernel:视差、深度中值滤波器的内核大小(N*N)
子像素:子像素有助于提高精度,对中远距离测距有一定的精度提升和数值稳定的作用,它也有助于更好地估计表面法线;以下是开启和关闭的示例:
子像素开启:
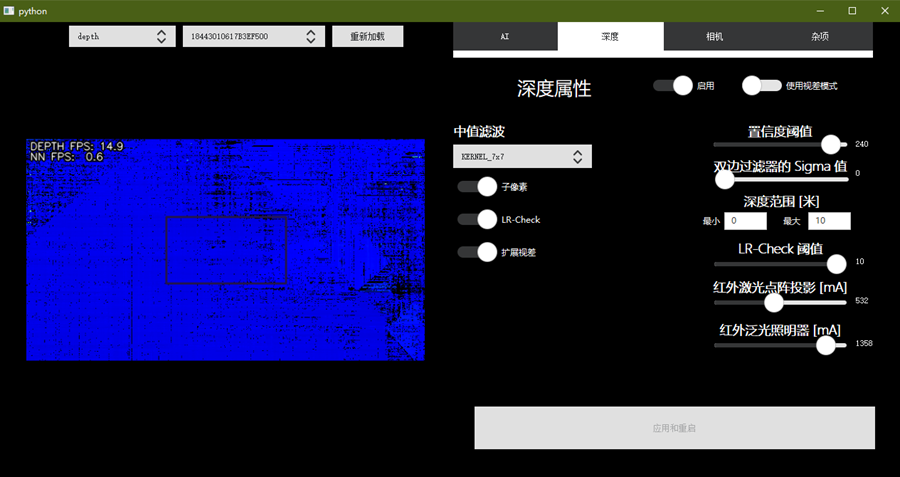
子像素关闭:
LR-Check:(Left – Right Check):双目的左右相机视图略有不同,可能会出现物体边界遮挡、被遮挡的情况,这个选项可以去除由于物体边界被遮挡而导致的不正确计算的差异像素;(无效像素)
红外激光点阵投影(mA): 红外点投影的亮度,数值越大结构光强度越高。
红外泛光照明器(mA):红外泛光照明的亮度,数值越大,亮度越高;
PS:产品名中若没有带Pro的系列(不具备结构光功能),以上两个滑动条不能工作;
相机部分:
含有RGB相机和Mono相机的信息,以及色彩空间信息;