文章不介绍具体参数,有需求可去网上搜索。
特别声明:不论年龄,不看学历。既然你对这个领域的东西感兴趣,就应该不断培养自己提出问题、思考问题、探索答案的能力。
提出问题:提出问题时,应说明是哪款产品,在哪一步,遇到了什么问题,并提供必要的图片与视频信息。一个好的问题,可以更快的得到答案。
思考问题:思考如何快速、有效的解决问题?如果需要3D模型等文件,机器人使用遇到问题,肯定是直接在群里问。如果是想了解开发板等模块的具体参数,一定是网上搜索最快捷,最丰富。
探索答案:现如今AI已经十分智能,豆包、千问、DeepSeek,每一个都是经验丰富的大师。相比较而言个人的知识储备反而十分有限。所以,有什么困惑,不如先问问AI。
前言:
机器人运行有任何问题,都要先充电。
充电前,要关闭机器人。防止机器人损坏。
充电原因:
电池厂家发货,一般电池电量维持在30%左右,要不然电池电量满电发货,电池活性太高,容易有安全隐患
锂电池充电注意事项:
1. 充电的时候旁边要有人看着;
2. 睡觉的时候不要充电;
3. 一般充电1-2小时即可;
发货前已经烧录程序
主控:STM32F103C8T6最小系统
注:以实物为准。
此开发板是机器人主要控制器,用来控制舵机转动。机器人没有预留多余引脚。
原理图和PCB(白色的模块连接板)
基本原理参考以下俩图。不提供原理图和PCB文件。
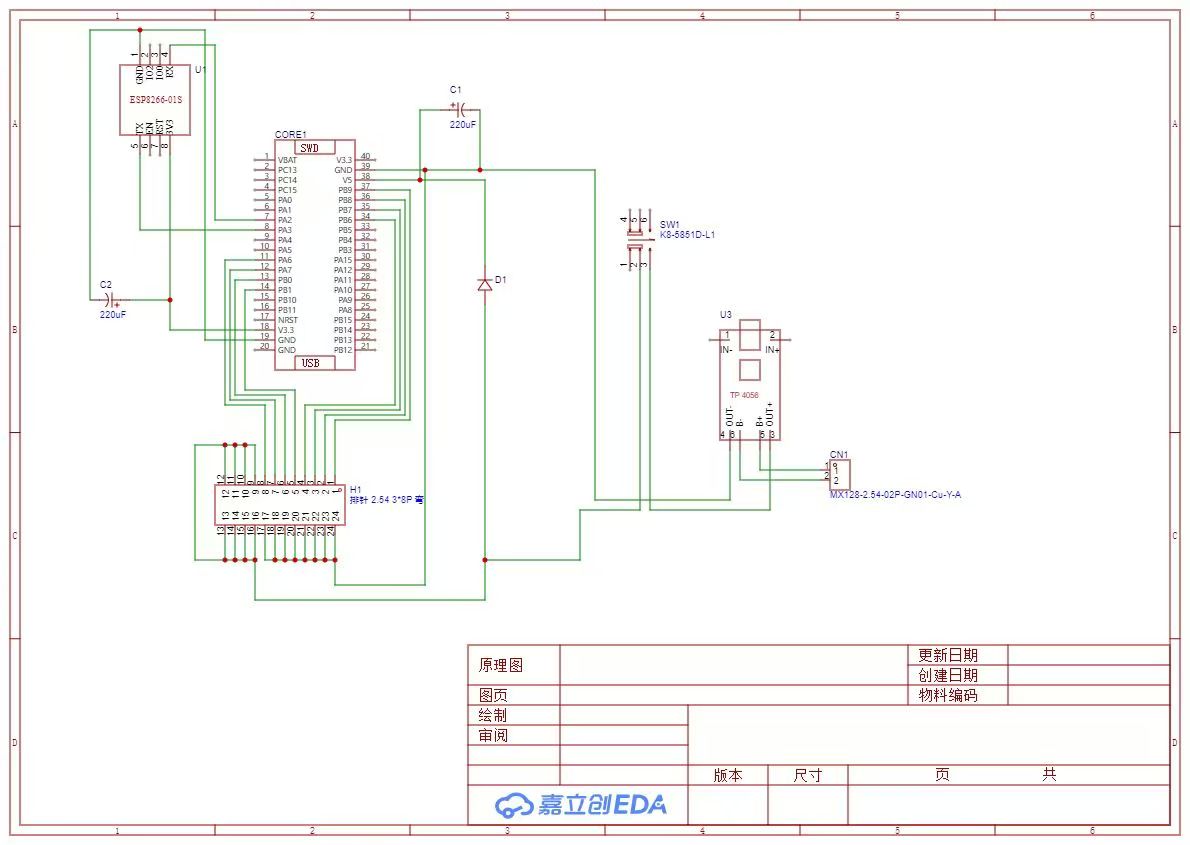

ESP-01S与下载器
ESP-01S是基于ESP8266设计的模块。此模块通过串口TX、RX连接STM32F103C8T6最小系统,并以自身WiFi功能连接手机,以实现手机APP控制机器人运动。

可以给上面的模块下载程序 。

WiFi
WiFi名称:ESP8266_666
WiFi密码:12345678
APP
按照组装教程末尾的视频安装与使用。
没有APP源码,无法更改APP LOGO。
电池
电池具体参数见实物丝印。
关于二次开发
群内专注于产品组装指导及使用教程服务。产品发货前已经程序烧录,开箱即可快速上手。
关于开发环境:由于涉及软件环境配置(如代码编译、下载工具链等)存在较高的电脑系统差异性,且可能产生不可预见的兼容性问题,我们无法为每位用户提供一对一的环境配置支持。
如果有二次开发需求,建议通过开源社区、技术论坛等渠道获取更多教程资源。感谢理解!
3D模型文件
提供3D模型打印文件和装配图。问群内管理员要。
3D模型文件通常用SolidWorks打开。注:肯定能打开,如果不会如何打开可去网上搜索。
关于模型文件设计,只要是可以设计3D模型,能够满足我们需求的,理论上都可以。建议使用fusion,简单易上手。
注:群内专注于产品组装和使用答疑。因人力有限,不提供除此以外的答疑服务。若在能力范围内,可为大家提供思路,后续需大家自行探索。




——处理流程设计、系统设计、人机界面设计)