FreeRTOS二值信号量详解与实战教程
📚 作者推荐:想系统学习FreeRTOS嵌入式开发?请访问我的FreeRTOS开源学习库,内含从入门到精通的完整教程和实例代码!
1. 二值信号量核心概念解析
二值信号量(Binary Semaphore)是FreeRTOS提供的一种简单而强大的同步工具,它只有两个可能值:0或1。这种简单特性使它成为嵌入式系统中极其实用的同步原语。
💡 形象理解:二值信号量就像公共卫生间的占用指示灯:
- 绿灯(值为1):资源可用,任务可以获取
- 红灯(值为0):资源被占用,需要等待
2. 二值信号量三大应用场景
2.1 资源互斥访问
当多个任务需要访问共享资源(如全局变量、外设)时,二值信号量能确保任一时刻只有一个任务能访问该资源:
// 任务想要访问共享资源时
xSemaphoreTake(xMutexSemaphore, portMAX_DELAY); // 获取访问权
// 访问共享资源
xSemaphoreGive(xMutexSemaphore); // 释放访问权
2.2 任务同步控制
实现"任务A必须在任务B之前完成"的先后依赖关系:
// 任务A完成工作后
xSemaphoreGive(xSyncSemaphore); // 发出"我完成了"的信号// 任务B开始前
xSemaphoreTake(xSyncSemaphore, portMAX_DELAY); // 等待任务A完成
// 开始任务B的工作
2.3 任务阻塞与唤醒机制
FreeRTOS使用优先级管理等待同一信号量的多个任务:
- 不同优先级:高优先级任务优先获得信号量
- 相同优先级:先等待的任务先获得信号量
3. 二值信号量的底层实现揭秘
🔍 底层原理:二值信号量实质上是一个队列长度为1的特殊队列!
在FreeRTOS内核中:
- 队列为空 → 信号量值为0(不可用)
- 队列有元素 → 信号量值为1(可用)
这种实现使二值信号量具有队列的所有优势,包括任务阻塞和优先级继承等特性。
4. 二值信号量核心API详解
| 函数 | 描述 | 使用场景 |
|---|---|---|
vSemaphoreCreateBinary() | 创建二值信号量(创建后自动释放一次) | 需要初始状态为"可用"的场景 |
xSemaphoreCreateBinary() | 创建二值信号量(不会自动释放) | 需要初始状态为"不可用"的场景 |
xSemaphoreTake() | 获取信号量(将信号量由1变为0) | 任务中获取信号量 |
xSemaphoreGive() | 释放信号量(将信号量由0变为1) | 任务中释放信号量 |
xSemaphoreTakeFromISR() | 中断中获取信号量 | 中断服务程序中获取信号量 |
xSemaphoreGiveFromISR() | 中断中释放信号量 | 中断服务程序中释放信号量 |
5. 二值信号量实战示例教程
下面通过一个完整示例展示二值信号量的使用方法。我们创建两个任务:
- 任务1:定期释放信号量
- 任务2:等待并获取信号量,成功后打印提示
5.1 代码实现步骤
-
准备工程:复制006多任务创建模板,并重命名为010
-
删除不必要的代码:
#include "queue.h"
TaskHandle_t myTaskHandler3;
struct print{int cnt;char data[20];
};
struct print data = {.data = "myTask1 runnig"};
data.cnt++;xQueueSend(myPrintfQueueHandler, &data, 0);
struct print data = {.data = "myTask2 runnig"};
data.cnt++;xQueueSend(myPrintfQueueHandler, &data, 0);
void myTask3(void *arg)
{struct print data;BaseType_t xStatus;while(1){xStatus = xQueueReceive(myPrintfQueueHandler, &data, portMAX_DELAY);if(xStatus == pdPASS){taskENTER_CRITICAL();printf("%s:%d\n", data.data,data.cnt);taskEXIT_CRITICAL();}
// vTaskDelay(500);}
}
xTaskCreate(myTask3,"myTask3",128,NULL,2,&myTaskHandler3);
myPrintfQueueHandler = xQueueCreate(2,sizeof(struct print));
- 导入信号量头文件:
#include "semphr.h" //信号量相关的头文件
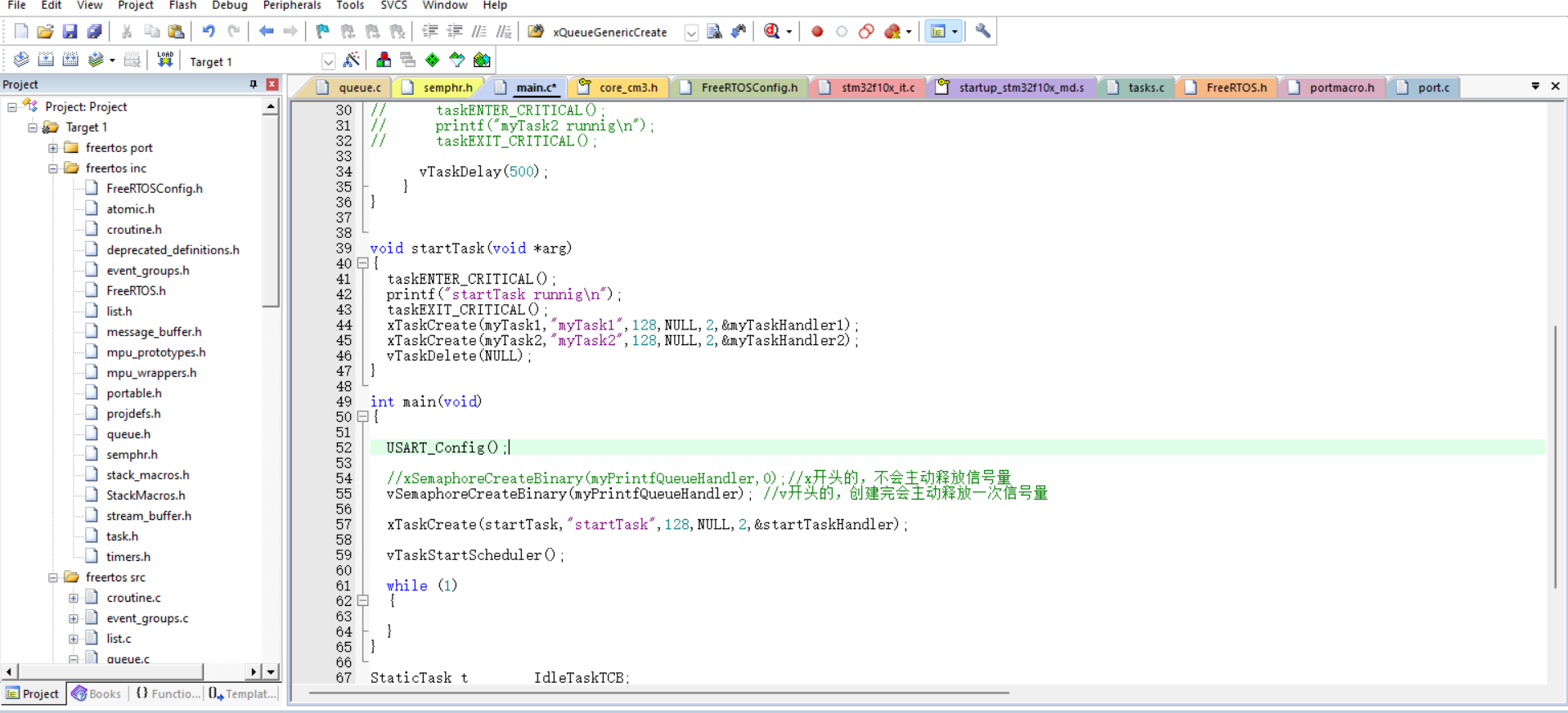
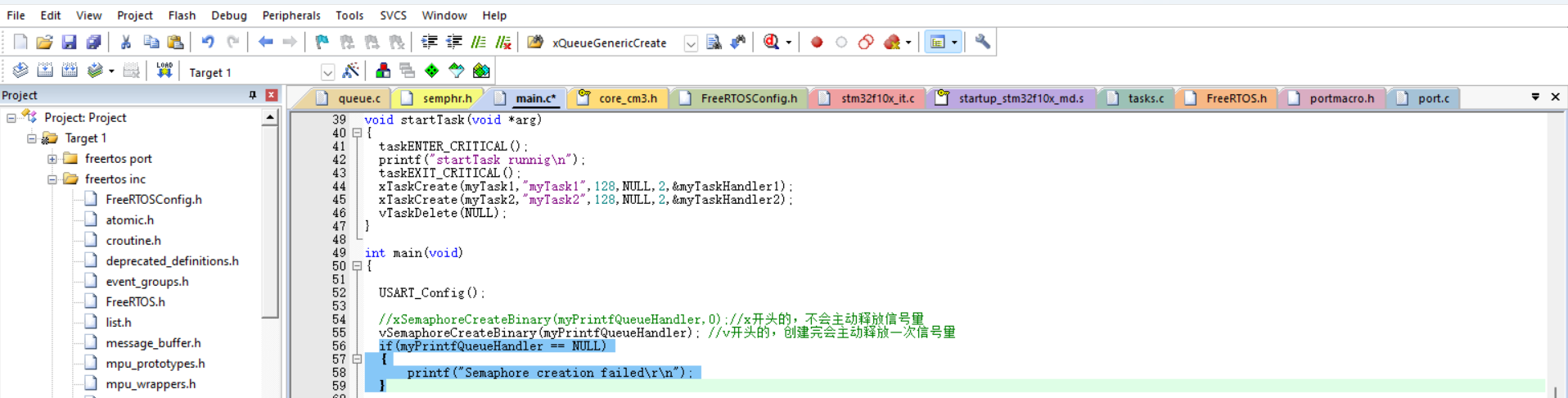
- 创建二值信号量:

深入理解:为什么选择v开头的创建函数?
查看vSemaphoreCreateBinary定义,理解其内部实现:

#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )#define vSemaphoreCreateBinary( xSemaphore ) \{ \( xSemaphore ) = xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE ); \if( ( xSemaphore ) != NULL ) \{ \( void ) xSemaphoreGive( ( xSemaphore ) ); \} \}
#endif
从源码可以看出:
- 它首先创建一个长度为1的队列
- 创建成功后,立即执行
xSemaphoreGive释放信号量,使其初始值为1(可用状态) - 这正是我们需要的初始状态!
对比另一个创建函数:
#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )#define xSemaphoreCreateBinary() xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE )
#endif
xSemaphoreCreateBinary仅创建队列,不自动释放,初始值为0(不可用状态)。
-
声明信号量句柄:

-
创建失败检测:
-
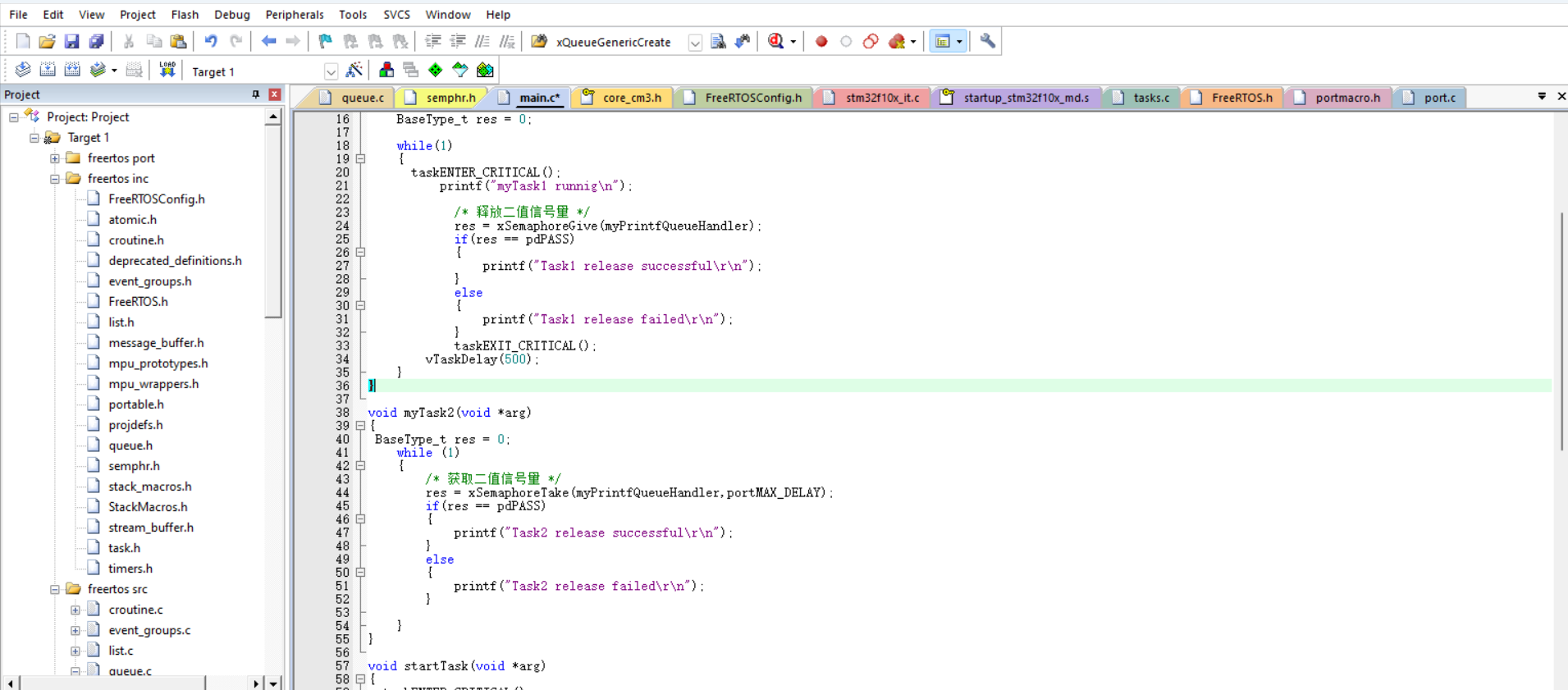
编写Task1(释放信号量):
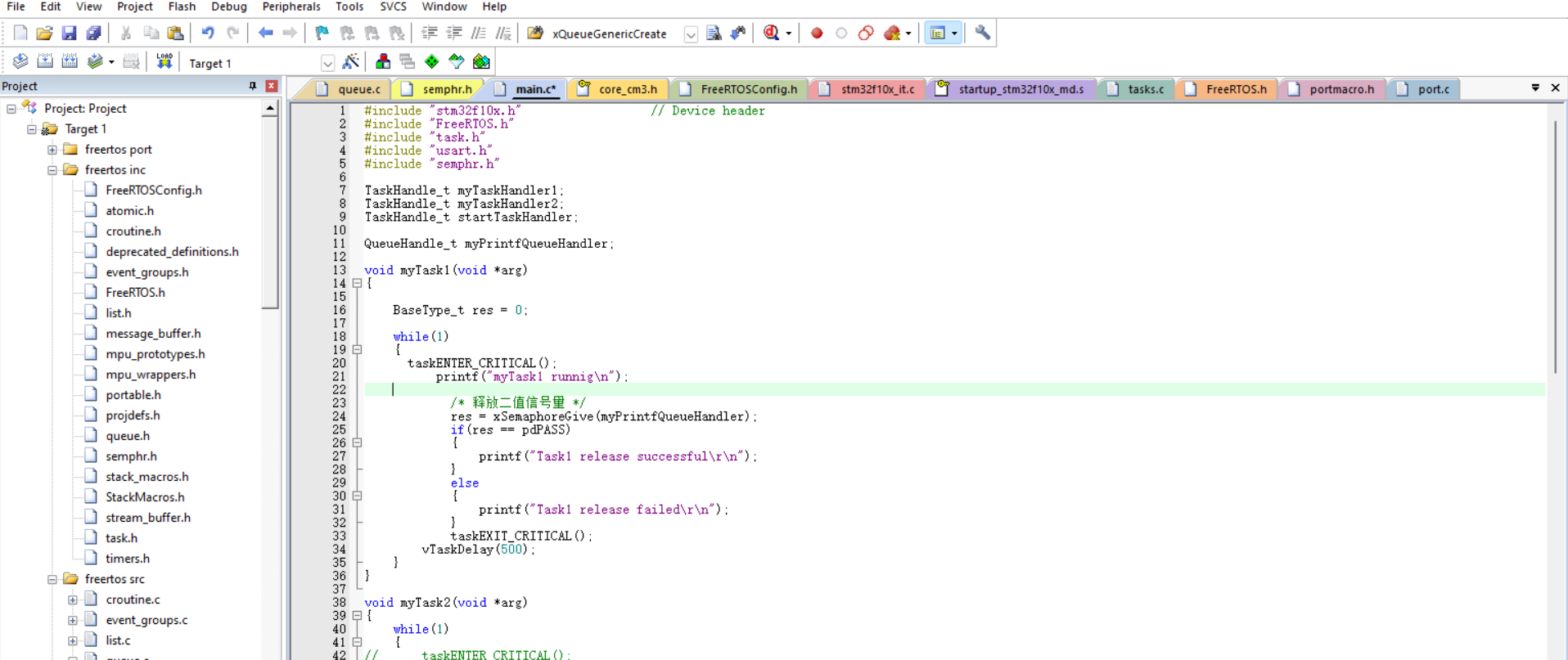
void myTask1(void *arg)
{BaseType_t res = 0;while(1){taskENTER_CRITICAL();printf("myTask1 runnig\n");/* 释放二值信号量 */res = xSemaphoreGive(myPrintfQueueHandler);if(res == pdPASS){printf("Task1 release successful\r\n");}else {printf("Task1 release failed\r\n");}taskEXIT_CRITICAL();vTaskDelay(500);}
}
📝 说明:这里使用临界区保护打印操作,防止多任务打印导致的输出混乱。
查看xSemaphoreGive定义:
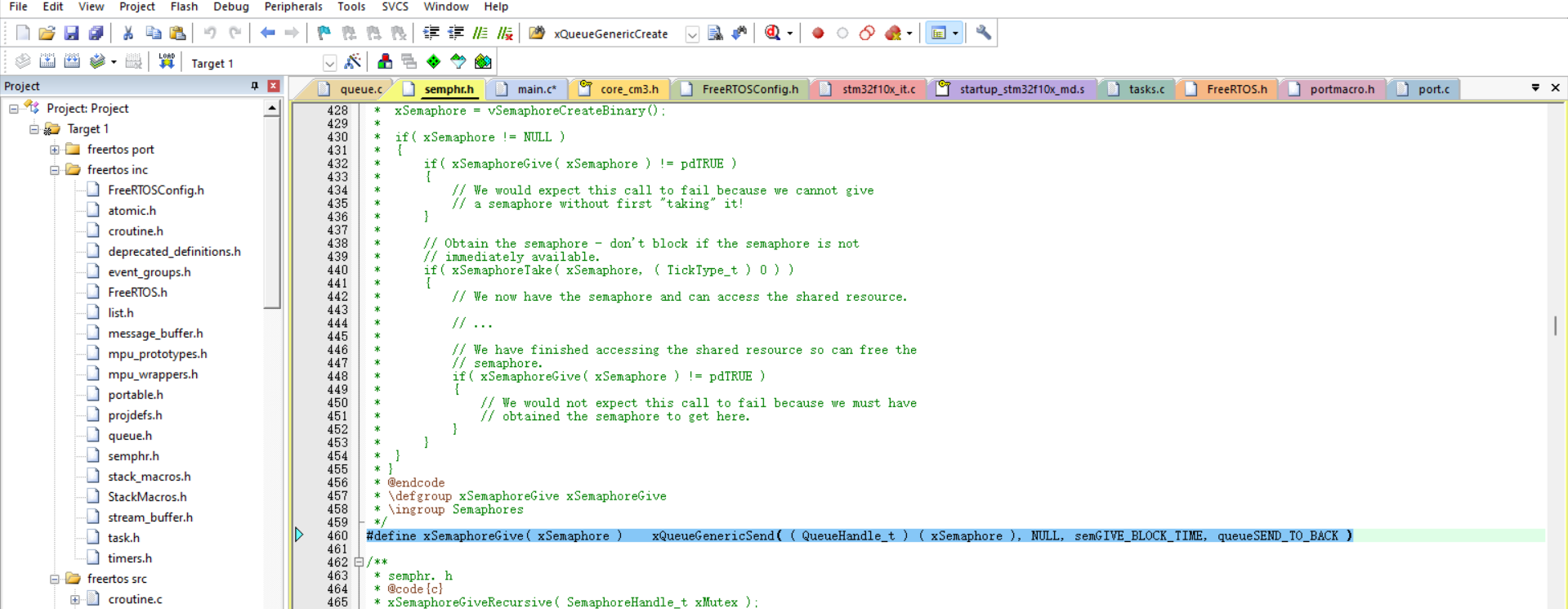
#define xSemaphoreGive( xSemaphore ) xQueueGenericSend( ( QueueHandle_t ) ( xSemaphore ), NULL, semGIVE_BLOCK_TIME, queueSEND_TO_BACK )
本质上是向队列发送一个空数据!
- 编写Task2(获取信号量):
void myTask2(void *arg)
{BaseType_t res = 0;while (1){/* 获取二值信号量 */res = xSemaphoreTake(myPrintfQueueHandler,portMAX_DELAY);if(res == pdPASS){printf("Task2 release successful\r\n"); }else {printf("Task2 release failed\r\n"); }}
}
查看xSemaphoreTake定义:
#define xSemaphoreTake( xSemaphore, xBlockTime ) xQueueSemaphoreTake( ( xSemaphore ), ( xBlockTime ) )
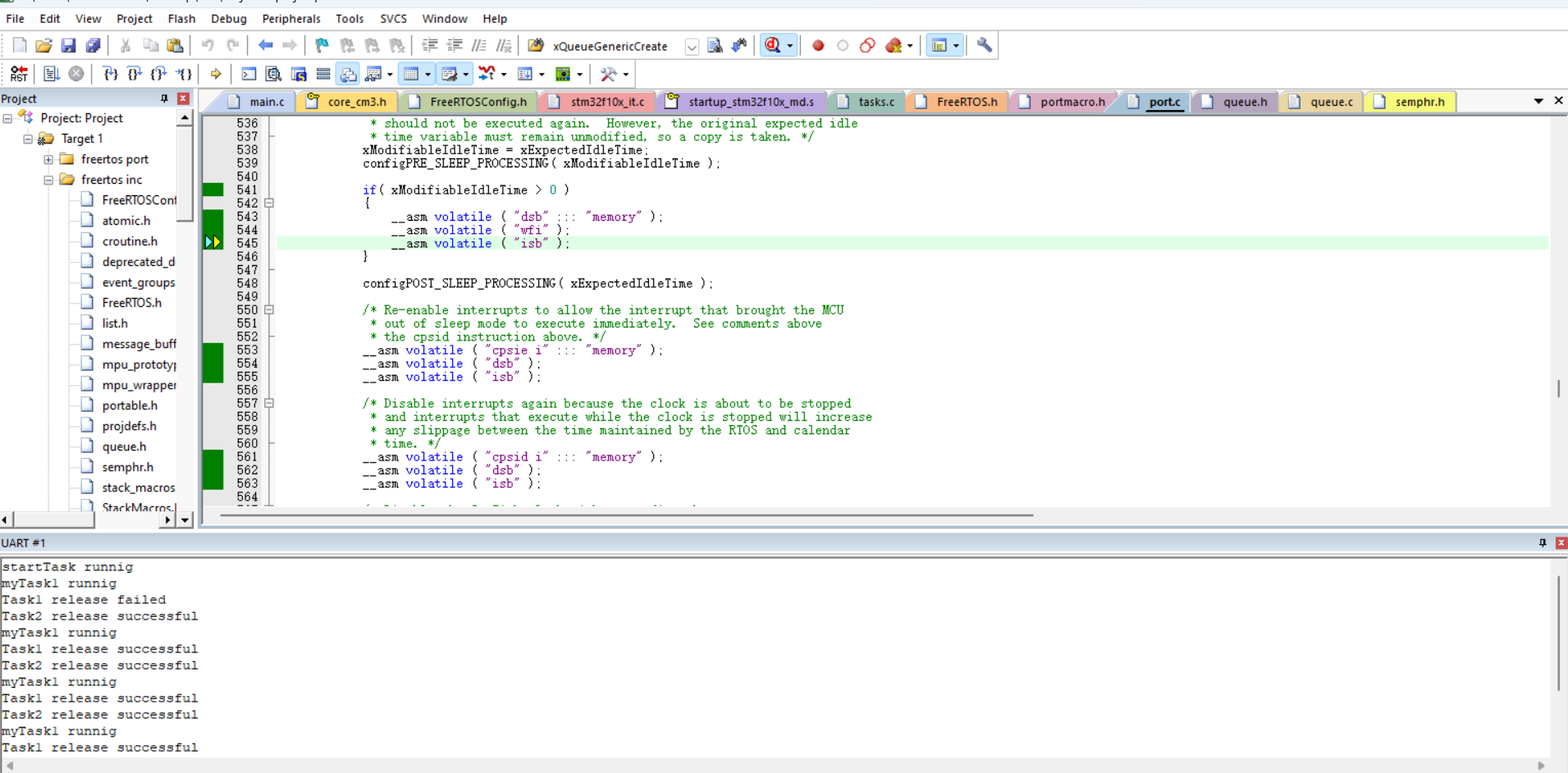
- 编译、调试、运行:输出如下内容表示成功
5.2 实例代码深度解析
-
创建信号量:使用
vSemaphoreCreateBinary()创建二值信号量,初始值为1(可用)。 -
Task1工作流程:
- 进入临界区(防止打印混乱)
- 打印运行状态信息
- 释放信号量(使值为1)
- 打印释放结果
- 退出临界区
- 延时500ms
-
Task2工作流程:
- 尝试获取信号量(将值从1变为0)
- 若成功(返回pdPASS),打印成功信息
- 若失败,打印失败信息
- 循环执行(无延时)
-
portMAX_DELAY参数:表示无限等待,直到获取到信号量才继续执行。
5.3 运行结果分析
执行程序后,我们观察到典型的执行顺序:
- 系统启动,Task2立即获取到信号量(因初始值为1)并打印成功信息。
- 信号量值变为0,Task2再次尝试获取时进入阻塞状态。
- Task1执行,释放信号量,值变为1。
- Task2被唤醒,获取信号量,打印成功信息。
- 周而复始,形成Task1释放→Task2获取的循环。
🔍 现象解释:为什么有时Task1的释放成功信息会出现在Task2的获取成功信息之后?
这是因为任务调度的时机。当Task1释放信号量后,如果Task2优先级高于Task1,系统会立即切换到Task2执行,导致Task2的打印先于Task1的释放成功信息。
6. 二值信号量高级特性与注意事项
-
跨任务操作:信号量的获取和释放可以在不同任务间进行,这是实现任务同步的基础。
-
初始状态选择:
- 使用
vSemaphoreCreateBinary():初始状态为"可用"(值为1) - 使用
xSemaphoreCreateBinary():初始状态为"不可用"(值为0)
- 使用
-
超时参数:
portMAX_DELAY:永久等待0:不等待,立即返回- 其他值:等待指定时间(单位为tick)
-
中断中使用:中断服务程序中必须使用
FromISR结尾的函数版本。
7. 总结与实践建议
二值信号量是FreeRTOS中极为强大且使用简单的同步工具,适用于互斥访问和任务同步场景。通过本教程的学习,你应该已经掌握了:
✅ 二值信号量的基本概念与原理
✅ 信号量的创建、获取与释放操作
✅ 常见应用场景与实现方法
✅ 底层实现机制与高级特性
应用建议
-
选择合适的场景:二值信号量适合简单的同步场景,复杂场景考虑计数信号量或事件组。
-
避免优先级反转:在互斥访问场景中,考虑使用互斥量(Mutex)代替二值信号量,因为互斥量支持优先级继承机制。
-
防止死锁:确保获取信号量的任务最终会释放它,避免系统陷入死锁。
📚 想深入学习FreeRTOS?
我整理了一套完整的FreeRTOS开发学习资源,从环境搭建到高级特性应用,包含大量实例代码和详细教程。欢迎star和fork!
扩展思考:在什么情况下,你会选择使用二值信号量而非互斥量(Mutex)或计数信号量?欢迎在评论区讨论!



