高级I/O操作与非阻塞I/O
在操作系统中,I/O(输入/输出)操作是所有实现的基础。本文将探讨阻塞I/O与非阻塞I/O的区别,以及如何使用有限状态机来实现非阻塞I/O,并介绍数据中继的概念。
阻塞I/O与非阻塞I/O
阻塞I/O
阻塞I/O是操作系统中默认的I/O操作方式。在阻塞I/O中,如果系统调用(如read()或write())无法立即执行,进程将被阻塞,直到可以进行I/O操作为止。这意味着,如果一个进程正在等待I/O操作,它将无法进行任何其他操作。
非阻塞I/O
非阻塞I/O允许进程在I/O操作无法立即执行时继续进行其他操作。在非阻塞模式下,如果读操作时设备数据不充足,或写数据时缓冲区空间不足,系统会返回一个EAGAIN错误,告诉进程当前无法进行I/O操作,进程可以稍后再试。
有限状态机编程
有限状态机(Finite State Machine, FSM)是一种用来处理复杂流程的编程模型。它适用于流程结构化的场景,也可以用于处理复杂且非结构化的流程。
有限状态机解决的问题是复杂流程。
简单流程:自然流程是结构化的,按照人类顺序思维解决的问题。
复杂流程:自然流程不是结构化的,比如先前的MultiButton。
实现非阻塞I/O
要在Linux操作系统下实现非阻塞I/O,可以使用O_NONBLOCK标志来设置文件描述符。以下是一个简单的示例,展示如何打开一个文件并以非阻塞方式读取数据。
int fd = open("file.txt", O_RDONLY | O_NONBLOCK);
if (fd < 0) {perror("open()");exit(1);
}
数据中继原理解析
数据中继是指在两个设备之间进行数据交换的过程。在数据中继中,一个设备作为源设备,另一个设备作为目标设备。数据中继的实现通常涉及两个状态机,一个用于读取数据(源设备)另一个用于写入数据(目标设备)。
假设打开两个设备,要在两个设备之间进行数据交换(数据中继)
两个设备也有其它数据来源
要实现的功能:
读左然后写右和读右然后写左
要是用阻塞的话左边一直没数据来会卡在读左等待
分成两个任务一个读左然后写右,一个读右然后写左
具体实例
在linux操作系统下实现终端设备界面相互切换。实现读取fd1的数据写入的fd2中,读取fd2的数据写入到fd1当中。
状态机简单示意图如下所示:
非阻塞IO
简单流程:自然流程是结构化的
复杂流程:自然流程不是结构化的
完成数据中继,就像copy文件的程序
非阻塞操作:
在Linux中,一切皆文件,文件读写操作默认是阻塞的。但是可以通过设置O_NONBLOCK标志将读写操作设置为非阻塞方式。如果读操作时设备数据不足或者写操作时缓冲区空间不足,系统会返回-EAGAIN错误,但不会阻塞线程。
例子
int fd = open("file.txt", O_RDONLY | O_NONBLOCK);
if (fd < 0) {perror("open()");exit(1);
}
fcntl
fcntl函数的作用是获取和设置文件的访问模式和状态标志。
int fcntl(int fd, int cmd, ... /* arg */);
参数说明:
- fd:文件描述符。
- cmd:控制命令,如F_GETFL和F_SETFL。
- F_GETFL (void):返回文件访问模式和文件状态标志。
- F_SETFL (int):设置文件状态标志为指定值,忽略文件访问模式和文件创建标志。
在Linux中,F_SETFL命令可以改变O_APPEND、O_ASYNC、O_DIRECT、O_NOATIME和O_NONBLOCK标志,但不能改变O_DSYNC和O_SYNC标志。
relay函数编写
- 获取文件原有状态。
- 在原有状态基础上添加非阻塞状态。
relay(int fd1, int fd2) {int fd1save = fcntl(fd1, F_GETFL); // 获取文件状态fcntl(fd1, F_SETFL, fd1save | O_NONBLOCK); // 设置文件为非阻塞状态int fd2save = fcntl(fd2, F_GETFL); // 获取文件状态fcntl(fd2, F_SETFL, fd2save | O_NONBLOCK); // 设置文件为非阻塞状态
}
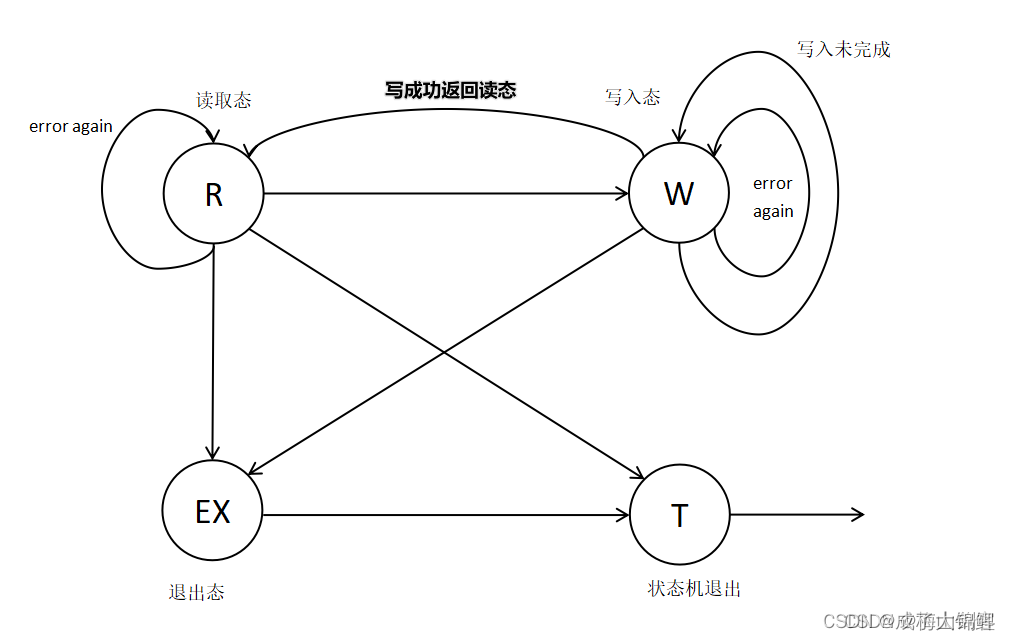
定义两个状态机,一个负责从源文件读取数据到目标文件,另一个负责从目标文件读取数据到源文件。
// 状态机状态枚举
enum {STATE_R = 1, // 读态STATE_W, // 写态STATE_EX, // 异常终止态STATE_T // 退出态
};// 状态机结构体
struct fsm_st {int state; // 当前状态int sfd; // 源文件描述符int dfd; // 目标文件描述符int len; // 读取长度int pos; // 位置char *errstr; // 报错信息char buf[BUFSIZE]; // 缓冲区
};// 初始化状态机
static void relay(int fd1, int fd2) {struct fsm_st fsm12, fsm21;int fd1save = fcntl(fd1, F_GETFL);fcntl(fd1, F_SETFL, fd1save | O_NONBLOCK);int fd2save = fcntl(fd2, F_GETFL);fcntl(fd2, F_SETFL, fd2save | O_NONBLOCK);fsm12.state = STATE_R;fsm12.sfd = fd1;fsm12.dfd = fd2;fsm21.state = STATE_R;fsm21.sfd = fd2;fsm21.dfd = fd1;// ...
}// 当不是退出态时,推动状态机
while (fsm12.state != STATE_T && fsm21.state != STATE_T) {fsm_driver(&fsm12);fsm_driver(&fsm21);
}// 恢复起始默认状态
fcntl(fd1, F_SETFL, fd1save);
fcntl(fd2, F_SETFL, fd2save);
}fsm_driver推动状态机
-----------------```c
static void fsm_driver(struct fsm_st *fsm) {int ret;switch (fsm->state) {case STATE_R:fsm->len = read(fsm->sfd, fsm->buf, BUFSIZE);if (fsm->len == 0) {fsm->state = STATE_T;} else if (fsm->len < 0) {fsm->errstr = "read()";fsm->state = STATE_EX;} else {fsm->pos = 0;fsm->state = STATE_W;}break;case STATE_W:ret = write(fsm->dfd, fsm->buf + fsm->pos, fsm->len);if (ret < 0) {fsm->errstr = "write()";fsm->state = STATE_EX;} else {fsm->pos += ret;fsm->len -= ret;if (fsm->len == 0) {fsm->state = STATE_R;} else {fsm->state = STATE_W;}}break;case STATE_EX:perror(fsm->errstr);fsm->state = STATE_T;break;case STATE_T:// 执行一些清理工作break;default:abort();}
}
完整代码
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>#define TTY1 "/dev/tty11"
#define TTY2 "/dev/tty12"#define BUFSIZE 1024/*状态机状态枚举类型*/
enum
{STATE_R=1, //读态STATE_W, //写态STATE_Ex, //异常终止态STATE_T //退出态
};/*状态机结构体*/
struct fsm_st
{int state; //当前状态机的状态int sfd;//源文件描述符int dfd;//目标文件描述符int len;//读取长度int pos;//位置char * errstr; //报错信息char buf[BUFSIZE]; //buf缓冲区
};/**************推动状态机****************/
static void fsm_driver(struct fsm_st*fsm)
{int ret;switch (fsm->state){/*状态机读取*/case STATE_R:/*读取到的源fd存储到buf中*/fsm->len = read(fsm->sfd,fsm->buf,BUFSIZE);/*如果读取0字节,退出状态机*/if (fsm->len == 0)fsm->state = STATE_T;/*如果读取<0字节,进行状态判断*/else if (fsm->len < 0){/*如果读取<0字节,二次判断*/if (errno == EAGAIN)fsm->state =STATE_R;else{/*宕机退出*/fsm->errstr = "read()";fsm->state =STATE_Ex;}}else/*都没有报错,说明读取正常,则开始状态机写入*/{/*******初始化写入的位置为0***************/fsm->pos = 0;fsm->state =STATE_W;}break;/*状态机写入*/case STATE_W:/*写入读取到的数据len*/ret = write(fsm->dfd,fsm->buf+fsm->pos,fsm->len);/*写入读取到的数据<0*/if(ret < 0){/*假的错误*/if (errno == EAGAIN)/*再次进入写入*/fsm->state = STATE_W;else/*真正读取错误*/{/*读取错误*/fsm->errstr = "read()";/*宕机退出*/fsm->state =STATE_Ex;}}else/***************坚持写够len个字节数***************/{/*******从pos的位置继续向下写入字节***************/fsm->pos += ret;fsm->len -= ret;/*如果写入完成*/if(fsm->len == 0)/*返回读态*/fsm->state = STATE_R;/*否则返回写态,继续写够len个字节*/elsefsm->state = STATE_W;}break;/*宕机退出*/case STATE_Ex:perror(fsm->errstr);fsm->state = STATE_T;break;/*完整退出*/case STATE_T:/*do sth*/break;default:/*如果都不是以上任意一个状态,发送异常*/abort();break;}}static void relay(int fd1,int fd2)
{struct fsm_st fsm12,fsm21; //定义结构体读左写右,读右写左/*首先保证文件是以非阻塞实现的*/int fd1_save = fcntl(fd1,F_GETFL); //获取文件状态fcntl(fd1,F_SETFL,fd1_save|O_NONBLOCK);//追加文件描述符的状态为非阻塞int fd2_save = fcntl(fd2,F_GETFL); //获取文件状态fcntl(fd2,F_SETFL,fd1_save|O_NONBLOCK); //追加文件描述符的状态为非阻塞/******************************//*初始化状态机*/fsm12.state = STATE_R;fsm12.sfd = fd1;fsm12.dfd = fd2;fsm21.state = STATE_R;fsm21.sfd = fd2;fsm21.dfd = fd1;/**************//*当不是退出态,推动状态机*/while (fsm12.state != STATE_T ||fsm21.state != STATE_T ){fsm_driver(&fsm12);fsm_driver(&fsm21);}/************************//*恢复起始默认状态*/fcntl(fd1,F_SETFL,fd1_save);fcntl(fd2,F_SETFL,fd2_save);/******************/
}int main()
{int fd1,fd2;/*模拟用户打开设备*/fd1 = open(TTY1,O_RDWR);if(fd1 < 0){perror("open()");exit(1);}write(fd1,"TTY1\n",5);/*模拟用户打开设备,以非阻塞方式打开设备*/fd2 = open(TTY2,O_RDWR|O_NONBLOCK);if(fd2 < 0){perror("open()");exit(1);}write(fd2,"TTY2\n",5);/*中继引擎函数*/relay(fd1,fd2);close(fd2);close(fd1);exit(0);
}测试:
要用root用户执行
ctl+atl+F11和ctl+atl+F12来回切换观察
ctl+atl+F1回到图像界面
IO多路转接
解决IO密集型任务中忙等的问题,监视多个文件描述符的行为,当当前文件描述符发生了我们感兴趣的行为时,才去做后续操作。常见的IO多路转接函数有select()、poll()、epoll()等。
select()
可以实现安全的休眠(替代sleep)前面都给NULL,只设置最后的timeout
-
select() 兼容性好 但设计有缺陷 以事件为单位组织文件描述符
-
nfds的类型问题
-
参数没有const修饰 也就是函数会修改 fdset 任务和结果放在一起
-
监视的事件太过单一 读 写 异常(异常的种类非常多)
-
原函数:
#include <sys/select.h>int select(int nfds, fd_set *readfds, fd_set *writefds,fd_set *exceptfds, struct timeval *timeout);
- 参数:
- fd_set 文件描述符集合
- void FD_CLR(int fd, fd_set *set); 在指定集合中删除指定文件描述符
- int FD_ISSET(int fd, fd_set *set); 判断一个文件描述符是否在集合
- void FD_SET(int fd, fd_set *set); 添加文件描述符到集合
- void FD_ZERO(fd_set *set); 集合置0
- nfds 要监视文件描述符里最大的再加1
- readfds 所关心的可以发生读的状态的集合(当里面有文件描述符发生读就返回)
- writerfds 所关心的可以发生写的状态的集合(当里面有文件描述符发生写就返回)
- exceptfds 所关心异常的情况
- timerout 超时设置(不设置会发生忙等)
- struct timeval {
time_t tv_sec; /* seconds /秒
suseconds_t tv_usec; / microseconds */微秒
};
- struct timeval {
- 返回值 返回发生行为的文件描述符的个数,发生行为的文件描述符会覆盖回原来的集合
- 会有假错,因为是阻塞的会被信号打断
忙等与非阻塞IO
- 忙等:会消耗CPU资源,当没有数据可读时会一直消耗CPU。
- 非阻塞IO:不会消耗CPU,当没有数据可读时会立即返回。
IO多路转接示例
#include <sys/select.h>static int max(int a, int b) {if (a > b) return a;return b;
}static void relay(int fd1, int fd2) {int old_fd1, old_fd2;fd_set rset, wset;old_fd1 = fcntl(fd1, F_GETFL);fcntl(fd1, F_SETFL, old_fd1 | O_NONBLOCK);old_fd2 = fcntl(fd2, F_GETFL);fcntl(fd2, F_SETFL, old_fd2 | O_NONBLOCK);struct fsm_st fsm12, fsm21; // 读左写右 读右写左fsm12.state = STATE_R;fsm12.sfd = fd1;fsm12.dfd = fd2;fsm21.state = STATE_R;fsm21.sfd = fd2;fsm21.dfd = fd1;while (fsm12.state != STATE_T || fsm21.state != STATE_T) {// 布置监视任务FD_ZERO(&rset);FD_ZERO(&wset);if (fsm12.state == STATE_R)FD_SET(fsm12.sfd, &rset);if (fsm12.state == STATE_W)FD_SET(fsm12.sfd, &wset);if (fsm21.state == STATE_R)FD_SET(fsm21.sfd, &rset);if (fsm21.state == STATE_W)FD_SET(fsm21.sfd, &wset);// 监视struct timeval ts;ts.tv_sec = 0;ts.tv_usec = 2;int maxfd = max(fd1, fd2);if (fsm12.state < STATE_AUTO || fsm21.state < STATE_AUTO) {if (select(maxfd + 1, &rset, &wset, NULL, &ts) < 0) {if (errno == EINTR)continue;perror("select()");exit(1);}}// 查看监视结果if (FD_ISSET(fd1, &rset) || FD_ISSET(fd2, &wset) || fsm12.state > STATE_AUTO) {fsm_driver(&fsm12);}if (FD_ISSET(fd2, &rset) || FD_ISSET(fd1, &wset) || fsm21.state > STATE_AUTO) {fsm_driver(&fsm21);}}// 恢复原来的文件描述符状态fcntl(fd1, F_SETFL, old_fd1);fcntl(fd2, F_SETFL, old_fd2);
}enum {STATE_R = 1,STATE_W,STATE_AUTO,STATE_Ex,STATE_T
};
在这个例子中,我们使用了select()函数来监视两个文件描述符fd1和fd2。当其中一个文件描述符准备好读或写时,相应的状态机fsm12或fsm21就会被推进。这里增加了一个STATE_AUTO状态,用于在EX或T状态之外的其他状态时,触发读写操作。这样可以避免在异常或退出状态时进行不必要的读写操作。
poll()
poll()函数用于等待文件描述符上的事件。它以文件描述符为单位组织事件,相比select()更加可移植。
原函数
#include <poll.h>int poll(struct pollfd *fds, nfds_t nfds, int timeout);
作用
fds: 指向struct pollfd数组的指针,用于指定要监视的文件描述符及其对应的事件。nfds: 要监视的文件描述符数量。timeout: 超时时间,单位为毫秒。-1表示阻塞直到有事件发生,0表示非阻塞立即返回,大于0表示等待指定时间。
参数
struct pollfd: 用于指定文件描述符和事件。fd: 文件描述符。events: 所关心的事件,如POLLIN(可读)、POLLOUT(可写)等。revents: 发生的事件。
返回值
- 返回就绪文件描述符的个数。
例子
#include <poll.h>static void relay(int fd1, int fd2) {int old_fd1, old_fd2;struct fsm_st fsm12, fsm21; // 读左写右 读右写左struct pollfd pfd[2];old_fd1 = fcntl(fd1, F_GETFL);fcntl(fd1, F_SETFL, old_fd1 | O_NONBLOCK);old_fd2 = fcntl(fd2, F_GETFL);fcntl(fd2, F_SETFL, old_fd2 | O_NONBLOCK);fsm12.state = STATE_R;fsm12.sfd = fd1;fsm12.dfd = fd2;fsm21.state = STATE_R;fsm21.sfd = fd2;fsm21.dfd = fd1;pfd[0].fd = fd1;pfd[1].fd = fd2;while (fsm12.state != STATE_T || fsm21.state != STATE_T) {// 布置监视任务pfd[0].events = 0; // 事件清零if (fsm12.state == STATE_R) // 1可读pfd[0].events |= POLLIN;if (fsm21.state == STATE_W) // 1可写pfd[0].events |= POLLOUT;pfd[1].events = 0; // 事件清零if (fsm21.state == STATE_R) // 2可读pfd[1].events |= POLLIN;if (fsm12.state == STATE_W) // 2可写pfd[1].events |= POLLOUT;// 监视if (fsm12.state < STATE_AUTO || fsm21.state < STATE_AUTO) {while (poll(pfd, 2, -1) < 0) {if (errno == EINTR)continue;perror("poll()");exit(1);}}// 查看监视结果if (pfd[0].revents & POLLIN || pfd[1].revents & POLLOUT || fsm12.state > STATE_AUTO) {fsm_driver(&fsm12);}if (pfd[1].revents & POLLIN || pfd[0].revents & POLLOUT || fsm21.state > STATE_AUTO) {fsm_driver(&fsm21);}}// 恢复原来的文件描述符状态fcntl(fd1, F_SETFL, old_fd1);fcntl(fd2, F_SETFL, old_fd2);
}
在这个例子中,我们使用了poll()函数来监视两个文件描述符fd1和fd2。poll()通过struct pollfd结构体来指定要监视的文件描述符和对应的事件。当文件描述符上发生的事件匹配我们设置的事件时,poll()会返回就绪文件描述符的个数。
epoll
epoll 是 Linux 特有的 I/O 多路复用机制,它是对 poll 机制的增强和优化,因此不具有跨平台性。
epoll_create()
原函数:
#include <sys/epoll.h>int epoll_create(int size);
作用:创建一个 epoll 实例。
参数:size 参数可以随意给一个大于 0 的数,用于指定 epoll 实例的最大监听数。
返回值:返回新创建的 epoll 实例的文件描述符。
epoll_ctl()
原函数:
#include <sys/epoll.h>int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
作用:控制 epoll 实例,对指定 epoll 实例 epfd 中的文件描述符 fd 执行操作 op(添加、修改、删除)。
参数:
epfd:epoll 实例的文件描述符。op:操作类型,如EPOLL_CTL_ADD、EPOLL_CTL_MOD、EPOLL_CTL_DEL。fd:要操作的文件描述符。event:指定的事件,包括events和data两个字段。
epoll_event 结构
events:所需监听的事件类型,如EPOLLIN(可读)、EPOLLOUT(可写)等。data:用户数据,可以是文件描述符,也可以是与文件描述符相关联的其他数据。
typedef union epoll_data {void *ptr;int fd;uint32_t u32;uint64_t u64;
} epoll_data_t;struct epoll_event {uint32_t events; /* Epoll events */epoll_data_t data; /* User data variable */
};epoll_wait()
原函数:
#include <sys/epoll.h>int epoll_wait(int epfd, struct epoll_event *events, int maxevents, int timeout);
作用:等待文件描述符上的事件。
参数:
epfd:epoll 实例的文件描述符。events:用于存放等待的事件。maxevents:最多可以返回的事件数。timeout:超时时间,-1 表示阻塞直到有事件发生,0 表示非阻塞立即返回,正数表示等待指定时间。
返回值:返回就绪的事件数。
示例
#include <sys/epoll.h>static void relay(int fd1, int fd2) {int old_fd1, old_fd2;struct fsm_st fsm12, fsm21; // 读左写右 读右写左struct epoll_event ev;old_fd1 = fcntl(fd1, F_GETFL);fcntl(fd1, F_SETFL, old_fd1 | O_NONBLOCK);old_fd2 = fcntl(fd2, F_GETFL);fcntl(fd2, F_SETFL, old_fd2 | O_NONBLOCK);fsm12.state = STATE_R;fsm12.sfd = fd1;fsm12.dfd = fd2;fsm21.state = STATE_R;fsm21.sfd = fd2;fsm21.dfd = fd1;int epfd = epoll_create(2);if (epfd < 0) {perror("epoll_create()");exit(1);}ev.data.fd = fd1;ev.events = 0;epoll_ctl(epfd, EPOLL_CTL_ADD, fd1, &ev);ev.data.fd = fd2;ev.events = 0;epoll_ctl(epfd, EPOLL_CTL_ADD, fd2, &ev);while (fsm12.state != STATE_T || fsm21.state != STATE_T) {ev.data.fd = fd1;ev.events = 0;// 布置监视任务if (fsm12.state == STATE_R) // 1可读ev.events |= EPOLLIN;if (fsm21.state == STATE_W) // 1可写ev.events |= EPOLLOUT;epoll_ctl(epfd, EPOLL_CTL_MOD, fd1, &ev);ev.data.fd = fd2;ev.events = 0;if (fsm21.state == STATE_R) // 2可读ev.events |= EPOLLIN;if (fsm12.state == STATE_W) // 2可写ev.events |= EPOLLOUT;epoll_ctl(epfd, EPOLL_CTL_MOD, fd2, &ev);// 监视if (fsm12.state < STATE_AUTO || fsm21.state < STATE_AUTO) {while (epoll_wait(epfd, &ev, 1, -1) < 0) {if (errno == EINTR)continue;perror("poll()");exit(1);}}// 查看监视结果if (ev.data.fd == fd1 && ev.events & EPOLLIN ||ev.data.fd == fd2 && ev.events & EPOLLOUT ||fsm12.state > STATE_AUTO) {fsm_driver(&fsm12);}if (ev.data.fd == fd2 && ev.events & EPOLLIN ||ev.data.fd == fd1 && ev.events & EPOLLOUT ||fsm21.state > STATE_AUTO) {fsm_driver(&fsm21);}}// 恢复原来的文件描述符状态fcntl(fd1, F_SETFL, old_fd1);fcntl(fd2, F_SETFL, old_fd2);close(epfd);
}
在这个示例中,我们使用 epoll 来监视两个文件描述符 fd1 和 fd2。我们首先使用 epoll_create 创建一个 epoll 实例,然后使用 epoll_ctl 添加这两个文件描述符。
在主循环中,我们根据状态机的当前状态来更新 epoll 实例中文件描述符的事件监听。然后,我们使用 epoll_wait 来等待文件描述符上的事件。当有事件发生时,我们根据事件更新状态机,并处理相应的读写操作。
最后,当状态机达到退出状态时,我们关闭 epoll 实例,并恢复文件描述符到非阻塞状态。
这个例子展示了如何使用 epoll 来实现非阻塞的 I/O 操作,适用于处理多个文件描述符的场景。




