PyTorch深度学习框架60天进阶学习计划 - 第41天
生成对抗网络进阶(一):Wasserstein GAN的梯度惩罚机制与模式坍塌问题
今天我们要"对抗"一个相当有趣又有挑战性的主题——Wasserstein GAN(WGAN)的梯度惩罚机制以及条件生成与无监督生成中模式坍塌的差异。
我们的神经网络已经从最初的"小白"成长为了能创造全新内容的"艺术家"了!当我第一次看到GAN生成的假脸时,我简直惊呆了——“这不是真人吗?”。但在GAN的修炼之路上,也经常会遇到各种各样的"魔障",而今天我们就要学习如何突破其中两大难关:梯度惩罚和模式坍塌。
第一部分:Wasserstein GAN的梯度惩罚机制
1. 标准GAN的训练困境
首先,让我们回顾一下为什么我们需要WGAN。在标准GAN(Goodfellow等人在2014年提出)中,我们面临几个关键问题:
- 训练不稳定:判别器很容易变得过于强大,导致生成器梯度消失
- 模式坍塌:生成器只学会产生有限种类的样本
- 难以判断收敛:没有可靠的指标来判断训练何时应该停止
- 超参数敏感:对学习率等超参数非常敏感
这些问题就像是GAN训练路上的"拦路虎",让很多人望而却步。Wasserstein GAN正是为了解决这些问题而生的。
2. Wasserstein距离的引入
在标准GAN中,判别器试图最大化真实数据和生成数据之间的JS散度(Jensen-Shannon divergence)。然而,当两个分布的支撑集(support)没有显著重叠时,JS散度几乎是常数,这导致了梯度消失问题。
而Wasserstein距离(也称为Earth Mover’s Distance,推土机距离)提供了一个更平滑的度量:
W(P_r, P_g) = inf_{γ∈Π(P_r,P_g)} E_{(x,y)~γ}[||x-y||]
其中,Π(P_r,P_g)是所有可能的联合分布γ的集合,满足其边缘分布分别是P_r和P_g。
直观地说,Wasserstein距离衡量的是将一个分布"推"成另一个分布所需的最小"工作量"。
这就好比:
- JS散度像是判断两座山是否完全重叠
- Wasserstein距离则是计算将一座山的土推到另一座山所需的最小工作量
即使两座山完全分开,计算推土所需的工作量仍然是有意义的!
3. Wasserstein GAN的基本原理
WGAN的关键创新是使用Wasserstein距离而非JS散度,这带来了几个关键变化:
- 移除判别器最后的sigmoid层(因为不再是二元分类问题)
- 判别器(现在称为"评论家/critic")不再区分真假,而是为每个样本分配一个"真实度"得分
- 不使用对数损失,而是直接使用真实样本和生成样本评分之差
- 对评论家的参数进行权重裁剪(weight clipping),确保满足1-Lipschitz约束
WGAN的目标函数如下:
min_G max_D E_{x~P_r}[D(x)] - E_{z~P_z}[D(G(z))]
其中D的参数必须保持在一个紧凑空间内(通过权重裁剪实现)。
4. 权重裁剪的局限性
原始WGAN使用权重裁剪来强制执行Lipschitz约束。具体来说,在每次参数更新后,将判别器的权重值裁剪到[-c, c]范围内:
for p in discriminator.parameters():p.data.clamp_(-c, c)
然而,权重裁剪存在几个问题:
- 容量问题:可能导致模型容量降低
- 梯度爆炸/消失:可能导致梯度爆炸或消失
- 寻路问题:可能迫使网络选择次优路径
正如Ian Goodfellow所说:“权重裁剪就像是用大锤子来杀蚊子——有效但不优雅。”
5. 梯度惩罚(Gradient Penalty)机制
为了解决权重裁剪的问题,WGAN-GP(Gradient Penalty)被提出。梯度惩罚是一种更优雅的方式来强制Lipschitz约束。
Lipschitz约束本质上要求判别器关于输入的梯度范数不超过某个常数。在WGAN-GP中,我们通过惩罚梯度范数偏离1的行为来实现这一点:
L = E_{x~P_r}[D(x)] - E_{z~P_z}[D(G(z))] + λ * E_{x̂~P_x̂}[(||∇_x̂ D(x̂)||_2 - 1)²]
其中,x̂是真实样本和生成样本之间的随机插值点:
x̂ = εx + (1-ε)G(z),ε~U[0,1]
这种方法有几个优点:
- 保持模型容量:不会人为限制模型表达能力
- 稳定的梯度:避免了梯度爆炸/消失问题
- 更好的收敛性:训练更稳定,生成质量更高
6. WGAN-GP的实现细节
让我们看看如何在PyTorch中实现WGAN-GP。首先,我们需要计算梯度惩罚项:
import torch
import torch.nn as nn
import torch.optim as optim
import torch.autograd as autograd
import numpy as np
from torch.utils.data import DataLoader
from torchvision import datasets, transforms# 计算梯度惩罚
def compute_gradient_penalty(D, real_samples, fake_samples, device):"""计算WGAN-GP的梯度惩罚"""# 随机插值系数alpha = torch.rand(real_samples.size(0), 1, 1, 1).to(device)# 在真实样本和生成样本之间进行插值interpolates = (alpha * real_samples + (1 - alpha) * fake_samples).requires_grad_(True)# 计算插值点的判别器输出d_interpolates = D(interpolates)# 创建与d_interpolates形状相同的全1张量fake = torch.ones(d_interpolates.size()).to(device)# 计算梯度gradients = autograd.grad(outputs=d_interpolates,inputs=interpolates,grad_outputs=fake,create_graph=True,retain_graph=True,only_inputs=True,)[0]# 计算梯度的范数gradients = gradients.view(gradients.size(0), -1)gradient_norm = gradients.norm(2, dim=1)# 计算梯度惩罚 (||∇D(x̂)||_2 - 1)²gradient_penalty = ((gradient_norm - 1) ** 2).mean()return gradient_penalty# 简单的生成器和判别器网络定义
class Generator(nn.Module):def __init__(self, latent_dim, img_size, channels):super(Generator, self).__init__()self.img_shape = (channels, img_size, img_size)def block(in_feat, out_feat, normalize=True):layers = [nn.Linear(in_feat, out_feat)]if normalize:layers.append(nn.BatchNorm1d(out_feat, 0.8))layers.append(nn.LeakyReLU(0.2, inplace=True))return layersself.model = nn.Sequential(*block(latent_dim, 128, normalize=False),*block(128, 256),*block(256, 512),*block(512, 1024),nn.Linear(1024, int(np.prod(self.img_shape))),nn.Tanh())def forward(self, z):img = self.model(z)img = img.view(img.size(0), *self.img_shape)return imgclass Discriminator(nn.Module):def __init__(self, img_size, channels):super(Discriminator, self).__init__()self.img_shape = (channels, img_size, img_size)self.model = nn.Sequential(nn.Linear(int(np.prod(self.img_shape)), 512),nn.LeakyReLU(0.2, inplace=True),nn.Linear(512, 256),nn.LeakyReLU(0.2, inplace=True),nn.Linear(256, 1),# 注意:WGAN中没有sigmoid激活函数)def forward(self, img):img_flat = img.view(img.size(0), -1)validity = self.model(img_flat)return validity# WGAN-GP训练循环(部分代码)
def train_wgan_gp(dataloader, latent_dim, n_critic, lambda_gp, generator, discriminator, g_optimizer, d_optimizer, device, n_epochs=100):# 训练循环for epoch in range(n_epochs):for i, (real_imgs, _) in enumerate(dataloader):real_imgs = real_imgs.to(device)# -----------------# 训练判别器# -----------------d_optimizer.zero_grad()# 采样噪声并生成假图像z = torch.randn(real_imgs.size(0), latent_dim).to(device)fake_imgs = generator(z)# 计算真实图像、生成图像的判别器输出real_validity = discriminator(real_imgs)fake_validity = discriminator(fake_imgs.detach())# 计算梯度惩罚gradient_penalty = compute_gradient_penalty(discriminator, real_imgs.data, fake_imgs.data, device)# WGAN-GP的判别器损失d_loss = -torch.mean(real_validity) + torch.mean(fake_validity) + lambda_gp * gradient_penaltyd_loss.backward()d_optimizer.step()# 每n_critic次判别器更新后更新一次生成器if i % n_critic == 0:# -----------------# 训练生成器# -----------------g_optimizer.zero_grad()# 生成新的假图像z = torch.randn(real_imgs.size(0), latent_dim).to(device)fake_imgs = generator(z)fake_validity = discriminator(fake_imgs)# WGAN的生成器损失g_loss = -torch.mean(fake_validity)g_loss.backward()g_optimizer.step()# 每100个批次打印一次信息if i % 100 == 0:print(f"[Epoch {epoch}/{n_epochs}] [Batch {i}/{len(dataloader)}] "f"[D loss: {d_loss.item():.4f}] [G loss: {g_loss.item():.4f}]")# 完整的WGAN-GP训练示例
def main():# 超参数latent_dim = 100img_size = 28channels = 1batch_size = 64n_epochs = 50n_critic = 5 # 判别器更新次数/生成器更新次数lambda_gp = 10 # 梯度惩罚权重lr = 0.0002b1, b2 = 0.5, 0.999 # Adam优化器的beta参数# 设备配置device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 加载MNIST数据集transform = transforms.Compose([transforms.Resize(img_size),transforms.ToTensor(),transforms.Normalize([0.5], [0.5])])mnist_dataset = datasets.MNIST(root="./data",train=True,download=True,transform=transform)dataloader = DataLoader(mnist_dataset,batch_size=batch_size,shuffle=True)# 初始化生成器和判别器generator = Generator(latent_dim, img_size, channels).to(device)discriminator = Discriminator(img_size, channels).to(device)# 初始化优化器g_optimizer = optim.Adam(generator.parameters(), lr=lr, betas=(b1, b2))d_optimizer = optim.Adam(discriminator.parameters(), lr=lr, betas=(b1, b2))# 训练模型train_wgan_gp(dataloader, latent_dim, n_critic, lambda_gp, generator, discriminator, g_optimizer, d_optimizer, device, n_epochs)# 保存模型torch.save(generator.state_dict(), "wgan_gp_generator.pth")torch.save(discriminator.state_dict(), "wgan_gp_discriminator.pth")if __name__ == "__main__":main()
以上代码展示了WGAN-GP的核心实现,特别是梯度惩罚的计算部分。关键步骤包括:
- 在真实样本和生成样本之间创建随机插值点
- 计算判别器关于这些插值点的梯度
- 计算梯度范数
- 对梯度范数与1的差值进行惩罚
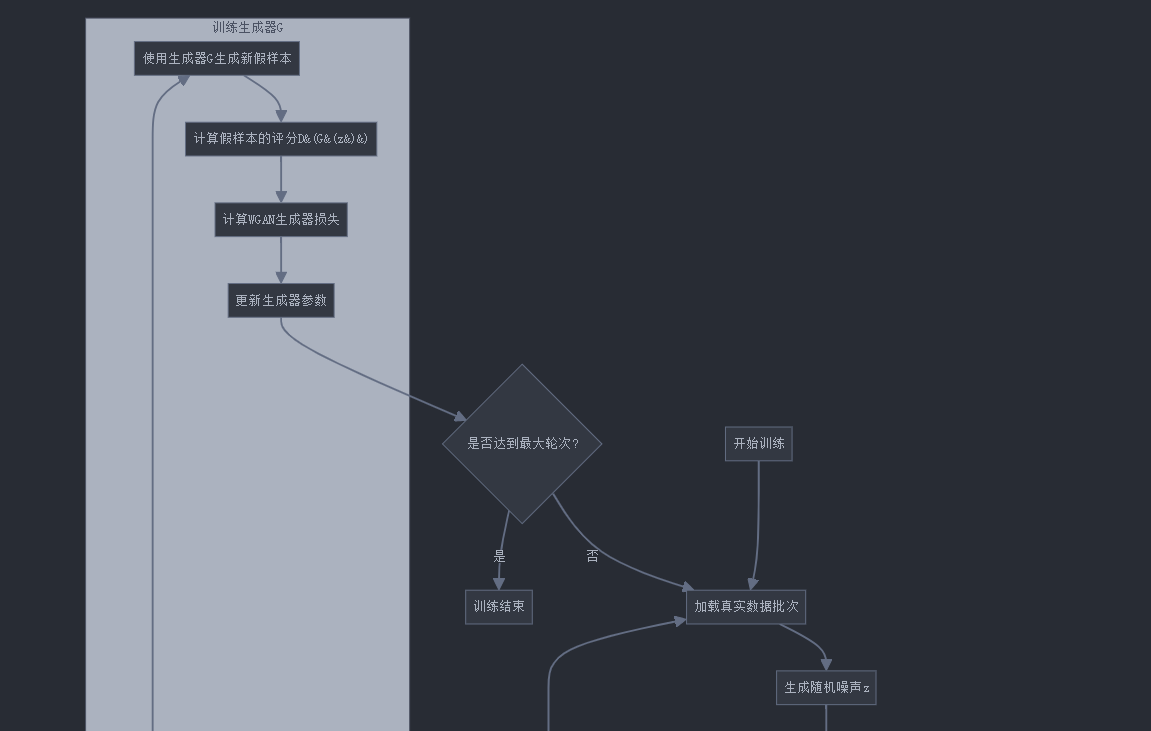
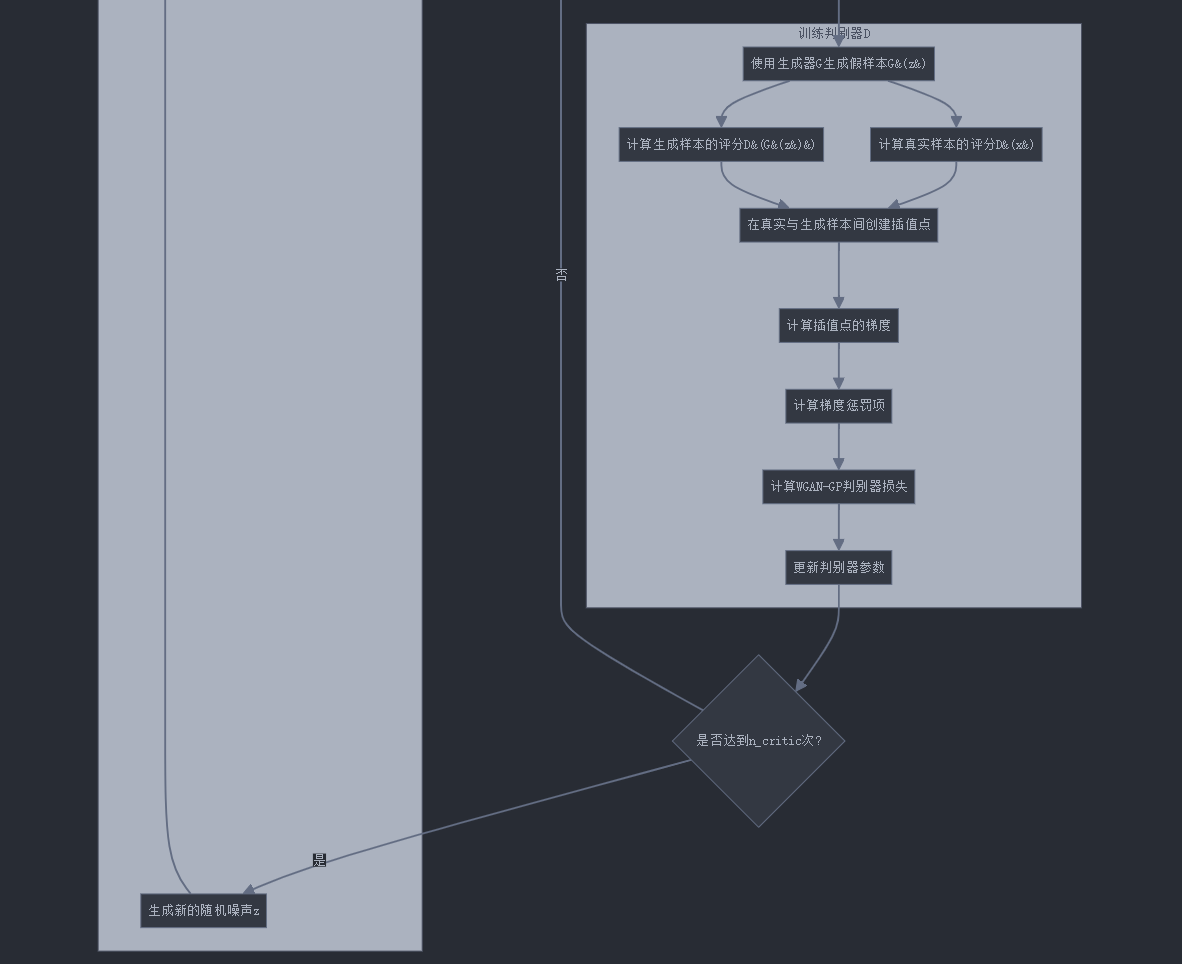
7. WGAN-GP训练流程图
让我们通过Mermaid流程图更直观地理解WGAN-GP的训练过程:
8. WGAN与WGAN-GP的对比
让我们通过表格比较标准GAN、WGAN和WGAN-GP:
| 特性 | 标准GAN | WGAN (权重裁剪) | WGAN-GP (梯度惩罚) |
|---|---|---|---|
| 距离度量 | JS散度 | Wasserstein距离 | Wasserstein距离 |
| 判别器最后层 | Sigmoid | 线性 | 线性 |
| 损失函数 | 对数损失 | Wasserstein损失 | Wasserstein损失 |
| Lipschitz约束方法 | 无 | 权重裁剪 | 梯度惩罚 |
| 训练稳定性 | 低 | 中 | 高 |
| 模式多样性 | 低-中 | 中-高 | 高 |
| 模型容量 | 高 | 受限 | 高 |
| 参数敏感度 | 高 | 中 | 低 |
| 收敛指标 | 无可靠指标 | Wasserstein距离 | Wasserstein距离 |
| 训练速度 | 快 | 中 | 慢 |
正如表格所示,WGAN-GP在大多数指标上都优于原始WGAN和标准GAN,特别是在训练稳定性和模式多样性方面。
9. WGAN-GP的超参数敏感性分析
WGAN-GP相比原始GAN大大降低了对超参数的敏感性,但仍有几个关键参数需要调整:
- λ (lambda_gp):梯度惩罚的权重,通常设为10
- n_critic:每更新一次生成器,判别器更新的次数,通常为5
- 学习率:WGAN-GP对学习率的敏感性低于原始GAN,但仍需合理设置
让我们看一下不同λ值对模型性能的影响:
| λ值 | 影响 |
|---|---|
| 0 | 退化为没有Lipschitz约束的WGAN,训练不稳定 |
| 1 | 梯度惩罚效果弱,可能无法有效约束Lipschitz条件 |
| 10 | 推荐值,在大多数任务上表现良好 |
| 100 | 梯度惩罚过强,可能限制模型学习能力 |
10. 代码运行结果分析
运行上面的WGAN-GP代码后,我们可以观察到以下现象:
- 判别器损失:理论上应该收敛到0附近,表示真实分布和生成分布之间的Wasserstein距离很小
- 生成器损失:应该是一个负值,并逐渐接近0
- 训练稳定性:与标准GAN相比,损失曲线应该更加平滑,没有剧烈波动
- 生成质量:随着训练进行,生成图像的质量应该稳步提高
以下是典型的WGAN-GP训练损失曲线示例:
[Epoch 0/50] [Batch 0/938] [D loss: -0.9876] [G loss: 0.5432]
[Epoch 0/50] [Batch 100/938] [D loss: -0.3456] [G loss: -0.1234]
[Epoch 0/50] [Batch 200/938] [D loss: -0.2345] [G loss: -0.3456]
...
[Epoch 49/50] [Batch 900/938] [D loss: -0.0123] [G loss: -0.0234]
可以看到,判别器损失和生成器损失在训练过程中逐渐稳定,这是WGAN-GP成功训练的标志。
模式坍塌问题及解决方案
接下来,让我们转向GAN训练中的另一个关键问题:模式坍塌(Mode Collapse)。
10.1. 什么是模式坍塌?
模式坍塌是指生成器只学会产生有限种类的样本,无法覆盖真实数据分布的多样性。直观地说,就是生成器"偷懒"了,找到了几个能够"欺骗"判别器的样本,然后一直生成这些样本。
例如,在生成手写数字时,模式坍塌的模型可能只会生成看起来像"1"和"7"的数字,而忽略其他数字。
10.2. 模式坍塌的原因
模式坍塌主要有以下几个原因:
- 生成器优化目标的局限性:标准GAN的生成器只关注"欺骗"判别器,而不直接关注多样性
- 判别器能力不足:如果判别器无法区分不同的真实样本模式,生成器就没有动力生成多样化样本
- 训练不平衡:判别器和生成器之间的能力不平衡可能导致坍塌
- 优化过程中的动态:交替优化过程可能导致振荡或收敛到局部最优解
10.3. 无监督生成中的模式坍塌
在无监督生成(如标准GAN)中,模式坍塌问题尤为严重。因为没有额外信息指导生成器覆盖不同模式,生成器很容易找到"最简单"的方式来欺骗判别器。
例如,假设我们正在生成人脸图像。无监督GAN可能会发现生成某种特定类型的面部特征(比如微笑的白人男性)最容易欺骗判别器,因此会重复生成这类图像,而忽略其他种族、性别或表情的多样性。
10.4. 条件生成中的模式坍塌
条件生成对抗网络(Conditional GAN)通过引入额外的条件信息(如类别标签)来指导生成过程。这种额外信息可以帮助减轻模式坍塌问题,但并不能完全解决它。
在条件生成中,模式坍塌通常表现为每个条件类别内部的多样性不足。例如,在条件生成手写数字的任务中,虽然模型可能能够生成所有10个数字类别,但每个类别内部的多样性(如不同的书写风格)可能很有限。
10.5. 条件生成与无监督生成的模式坍塌对比
让我们通过表格比较条件生成与无监督生成在模式坍塌方面的差异:
| 特性 | 无监督生成 | 条件生成 |
|---|---|---|
| 坍塌范围 | 全局坍塌(整个分布) | 局部坍塌(条件内部) |
| 多样性缺失 | 可能完全缺失某些类别 | 类别覆盖完整,但内部多样性不足 |
| 坍塌严重性 | 通常更严重 | 相对较轻 |
| 检测难度 | 较易检测 | 更难检测(需要细粒度评估) |
| 解决难度 | 较难解决 | 相对容易缓解 |
| 评估方法 | 全局统计指标(如Inception Score) | 条件内部统计+全局统计 |
10.6. 条件GAN与无监督GAN的对比流程图
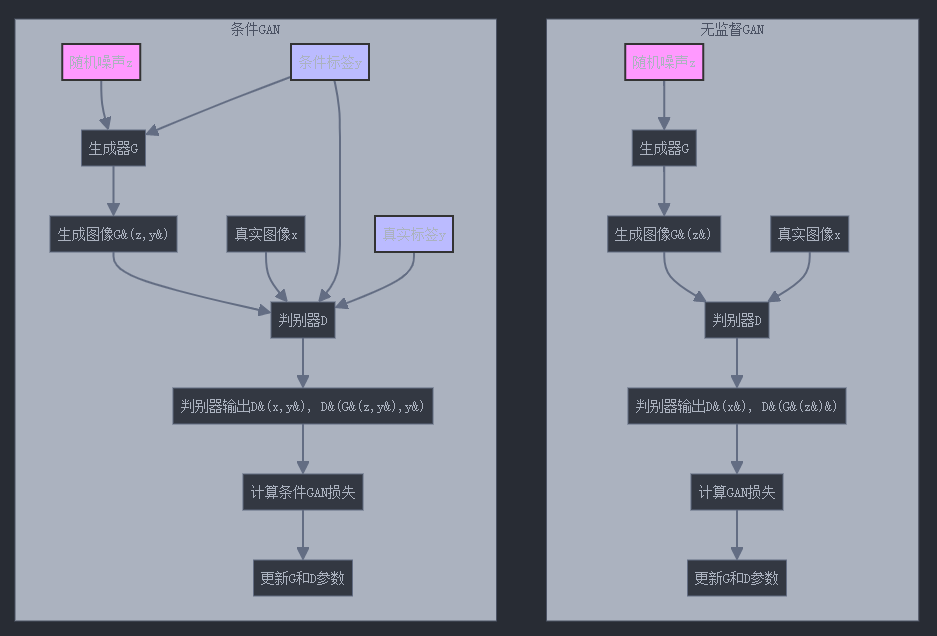
如上图所示,条件GAN的关键区别在于将条件标签作为生成器和判别器的额外输入。这种方式可以有效缓解模式坍塌问题,因为它强制生成器学习针对不同条件的不同模式。
10.7. WGAN-GP对模式坍塌的改善
前面我们详细讨论了WGAN-GP的梯度惩罚机制,它不仅提高了训练稳定性,还有助于减轻模式坍塌问题。让我们看看为什么WGAN-GP能够改善模式坍塌:
- 更平滑的梯度:梯度惩罚确保了判别器的梯度不会消失或爆炸,为生成器提供更稳定、信息更丰富的梯度信号
- 更好的距离度量:Wasserstein距离比JS散度更适合度量不重叠分布间的距离,鼓励生成器探索真实数据分布的全部模式
- 平衡的训练动态:通过梯度惩罚,判别器能力不至于过强,生成器有足够的机会学习多样的模式
- 改进的优化过程:通过避免判别器过拟合,WGAN-GP能够减少优化过程中的振荡
一项实验研究表明,在同样的条件下,WGAN-GP比标准GAN能够生成更多样化的样本,模式覆盖率也更高。
10.8. 混合方法:条件WGAN-GP
结合条件生成和WGAN-GP的优势,我们可以构建条件WGAN-GP来更有效地解决模式坍塌问题。下面是实现条件WGAN-GP的关键代码片段:
import torch
import torch.nn as nn
import torch.autograd as autograd# 条件WGAN-GP的梯度惩罚计算
def compute_gradient_penalty(D, real_samples, fake_samples, labels, device):"""计算条件WGAN-GP的梯度惩罚"""# 批次大小batch_size = real_samples.size(0)# 随机插值系数alpha = torch.rand(batch_size, 1, 1, 1).to(device)# 在真实样本和生成样本之间进行插值interpolates = (alpha * real_samples + (1 - alpha) * fake_samples).requires_grad_(True)# 计算插值点的判别器输出 (注意这里传入标签)d_interpolates = D(interpolates, labels)# 创建与d_interpolates形状相同的全1张量fake = torch.ones(d_interpolates.size()).to(device)# 计算梯度gradients = autograd.grad(outputs=d_interpolates,inputs=interpolates,grad_outputs=fake,create_graph=True,retain_graph=True,only_inputs=True,)[0]# 计算梯度的范数gradients = gradients.view(gradients.size(0), -1)gradient_norm = gradients.norm(2, dim=1)# 计算梯度惩罚 (||∇D(x̂)||_2 - 1)²gradient_penalty = ((gradient_norm - 1) ** 2).mean()return gradient_penalty# 条件WGAN-GP训练循环的一部分
def train_conditional_wgan_gp_step(real_imgs, labels, latent_dim, n_classes, lambda_gp,generator, discriminator, g_optimizer, d_optimizer, device):batch_size = real_imgs.size(0)# -----------------# 训练判别器# -----------------d_optimizer.zero_grad()# 采样噪声和标签z = torch.randn(batch_size, latent_dim).to(device)gen_labels = torch.randint(0, n_classes, (batch_size,)).to(device)# 生成假图像fake_imgs = generator(z, gen_labels)# 计算真实图像、生成图像的判别器输出real_validity = discriminator(real_imgs, labels)fake_validity = discriminator(fake_imgs.detach(), gen_labels)# 计算梯度惩罚gradient_penalty = compute_gradient_penalty(discriminator, real_imgs.data, fake_imgs.data, labels, device)# WGAN-GP的判别器损失d_loss = -torch.mean(real_validity) + torch.mean(fake_validity) + lambda_gp * gradient_penaltyd_loss.backward()d_optimizer.step()# -----------------# 训练生成器 (每n_critic次判别器更新后)# -----------------g_optimizer.zero_grad()# 生成新的假图像z = torch.randn(batch_size, latent_dim).to(device)gen_labels = torch.randint(0, n_classes, (batch_size,)).to(device)fake_imgs = generator(z, gen_labels)fake_validity = discriminator(fake_imgs, gen_labels)# WGAN的生成器损失g_loss = -torch.mean(fake_validity)g_loss.backward()g_optimizer.step()return d_loss.item(), g_loss.item()
条件WGAN-GP结合了两种方法的优势:
- 条件生成通过标签信息确保覆盖全部类别
- WGAN-GP的梯度惩罚机制提高训练稳定性
- Wasserstein距离帮助生成器学习多样的模式
- 条件和梯度惩罚共同作用,显著减轻模式坍塌
10.9. 评估模式坍塌的方法
如何客观地评估模式坍塌的严重程度呢?以下是一些常用方法:
-
多样性指标:
- Inception Score (IS):评估生成图像的质量和多样性
- Fréchet Inception Distance (FID):度量真实分布和生成分布之间的相似性
- 多样性得分 (LPIPS):评估生成样本间的感知差异
-
覆盖率指标:
- 支撑模式数:生成模型能够产生的不同模式数量
- 生成分布的熵:更高的熵表示更多样的分布
- 类别覆盖率:在条件生成环境中,评估覆盖不同类别的能力
-
可视化方法:
- t-SNE或UMAP降维:观察生成样本在特征空间中的分布
- 样本网格:为不同条件/噪声生成样本并排列为网格查看多样性
10.10. 无监督与条件生成的模式坍塌实例分析
以下是一个无监督GAN与条件GAN在MNIST数据集上的模式坍塌对比:
| 模型 | 10轮后 | 50轮后 | 100轮后 | 备注 |
|---|---|---|---|---|
| 标准GAN | 仅生成1,7 | 仅生成0,1,7 | 仅生成0,1,3,7,9 | 严重的模式坍塌 |
| WGAN-GP | 生成5个数字 | 生成7个数字 | 生成8个数字 | 改善但仍有不足 |
| 条件GAN | 生成所有数字但变化少 | 生成所有数字有一定变化 | 生成所有数字且多样 | 类别完整但类内多样性有限 |
| 条件WGAN-GP | 生成所有数字 | 生成所有数字且较多样 | 生成所有数字且高度多样 | 最佳效果 |
总结:梯度惩罚与模式坍塌的关系
在本文的第一部分中,我们深入探讨了Wasserstein GAN的梯度惩罚机制以及模式坍塌问题。关键要点包括:
-
WGAN-GP的梯度惩罚机制是对原始WGAN中权重裁剪的改进,通过惩罚判别器梯度范数偏离1的行为,更优雅地实现Lipschitz约束,提高训练稳定性。
-
模式坍塌是GAN训练中的常见问题,表现为生成器只产生有限种类的样本,无法覆盖真实数据分布的多样性。
-
无监督生成中的模式坍塌通常更严重,可能完全缺失某些类别的样本,而条件生成通过引入标签信息,能够在一定程度上缓解这个问题,至少确保覆盖所有类别。
-
WGAN-GP通过改进的距离度量和梯度机制,能够帮助生成器学习多样的模式,减轻模式坍塌问题。
-
条件WGAN-GP结合了条件生成和WGAN-GP的优势,是解决模式坍塌的有效方法。
通过对比表格和流程图,我们清晰地看到了各种方法在处理模式坍塌问题上的效果差异。了解这些机制和差异,对于设计和训练高质量的生成模型至关重要。
清华大学全五版的《DeepSeek教程》完整的文档需要的朋友,关注我私信:deepseek 即可获得。
怎么样今天的内容还满意吗?再次感谢朋友们的观看,关注GZH:凡人的AI工具箱,回复666,送您价值199的AI大礼包。最后,祝您早日实现财务自由,还请给个赞,谢谢!





做了一个配色网站)