一、角点检测
在计算机视觉中,角点检测是识别图像中局部区域(角点)的关键技术,这些区域通常是两条或多条边缘的交点,具有丰富的结构信息,常用于图像匹配、跟踪、三维重建等任务。
Harris角点检测算法是一种常用的计算机视觉算法,用于检测图像中的角点。该算法通过计算图像中每个像素的局部自相关矩阵,来判断该像素是否为角点。

角点检测算法的基本思想:
使用一个固定的小窗口在图像上进行任意方向的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化(sobel算子,在图像的边缘检测中有详细解释),那么我们可以认为该窗口中存在角点。
1、Harris 角点检测(经典方法)
1. 原理
基于图像局部灰度变化,通过计算像素点在x/y 方向的梯度,构建结构张量矩阵(梯度自相关矩阵),再通过响应函数判断是否为角点:
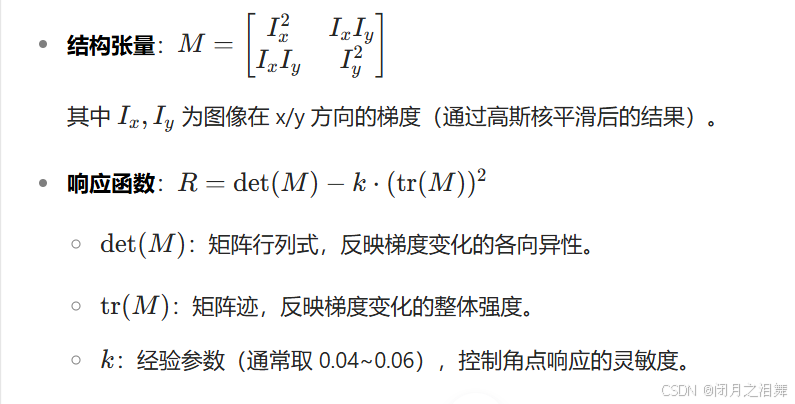
角点指图像中局部区域与周围区域有较大灰度变化的点或像素。 cornerHarris(img, blockSize, ksize, k[, dst[, borderType]]) -> dst• img:单通道灰度图像(数据类型为 float32)。• blockSize: 计算角点时考虑的邻域大小(如 2 表示 2x2 邻域)。• ksize:Sobel 梯度计算的核大小(常用 3)。• k: 响应函数中的参数,影响角点检测的敏感度(k 越小,检测到的角点越多)。,取值参数为 [0.04,0.06]。dst:返回numpy.ndarray对象,大小和src相同,值越大,对应像素点是角的概率越高
1、图片的读取以及灰度转换
img = cv2.imread('huanghelou.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)2、检测角点,并对响应值进行阈值处理
dst = cv2.cornerHarris(gray,4,3,0.04)
# 标记检测到的角点
img[dst > 0.01 * dst.max()] = [0, 255, 0]
# 这里通过对角点响应进行阈值处理,标记出检测到的角点。
# 0.05 * dst.max() 是一个阈值,大于这个值的像素点会被标记为绿色。
cv2.imshow('img',img)
cv2.waitKey(0)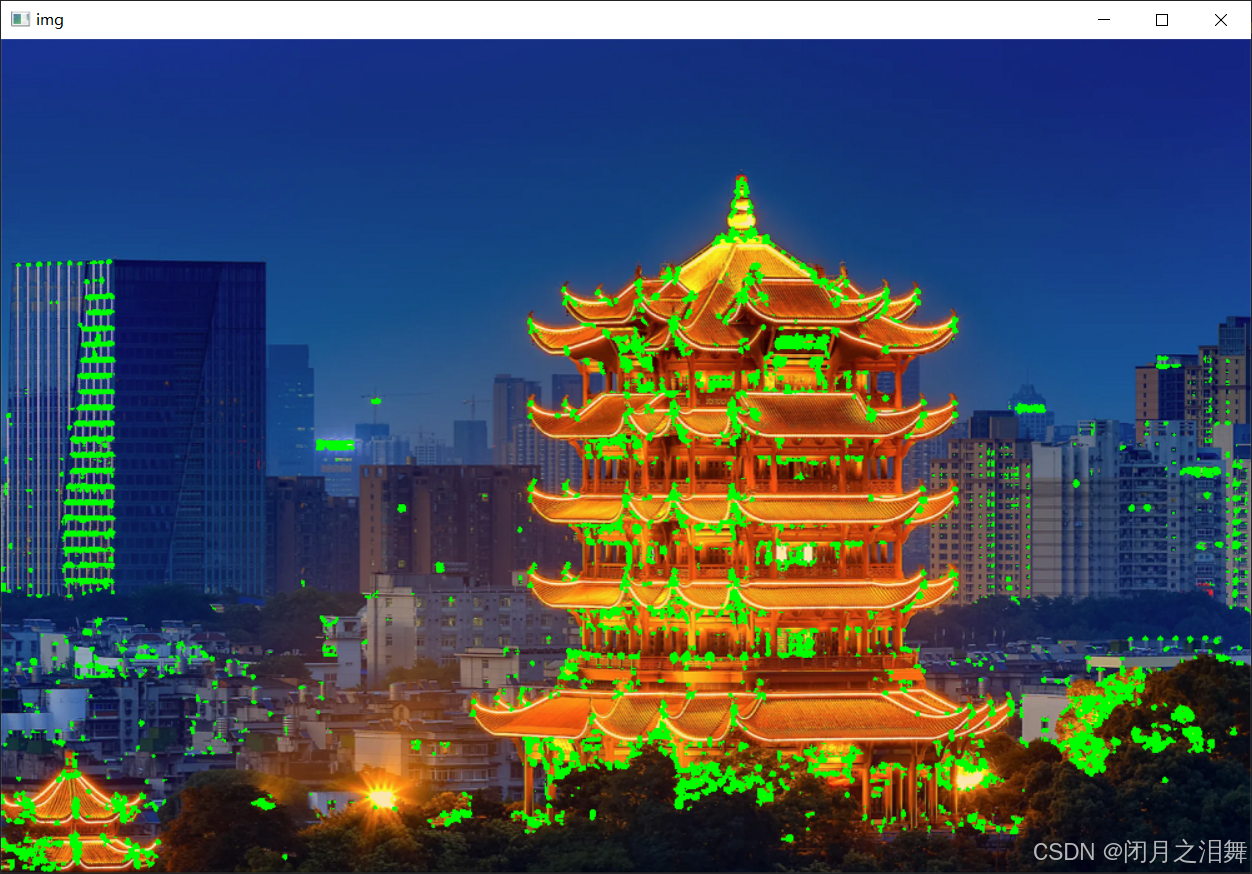
2、Shi-Tomasi 角点检测(Good Features to Track)
1. 原理
Harris 算法的改进版,直接利用矩阵 M 的最小特征值判断角点:
- 若最小特征值大于阈值,则认为是角点(相比 Harris 更鲁棒,尤其在图像跟踪中表现更好)。
2. OpenCV 函数
corners = cv2.goodFeaturesToTrack(gray_img, maxCorners, qualityLevel, minDistance)
- 参数:
maxCorners:最多检测的角点数量(若角点数量超过,按响应值降序筛选)。qualityLevel:角点质量阈值(0~1,值越小保留的角点越多,通常取 0.01~0.1)。minDistance:角点之间的最小像素距离(避免密集角点)。
- 输出:角点坐标数组(形状为
(N, 1, 2),N 为角点数量)。
3. 示例代码
import cv2
import numpy as npimg = cv2.imread('building.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# Shi-Tomasi角点检测
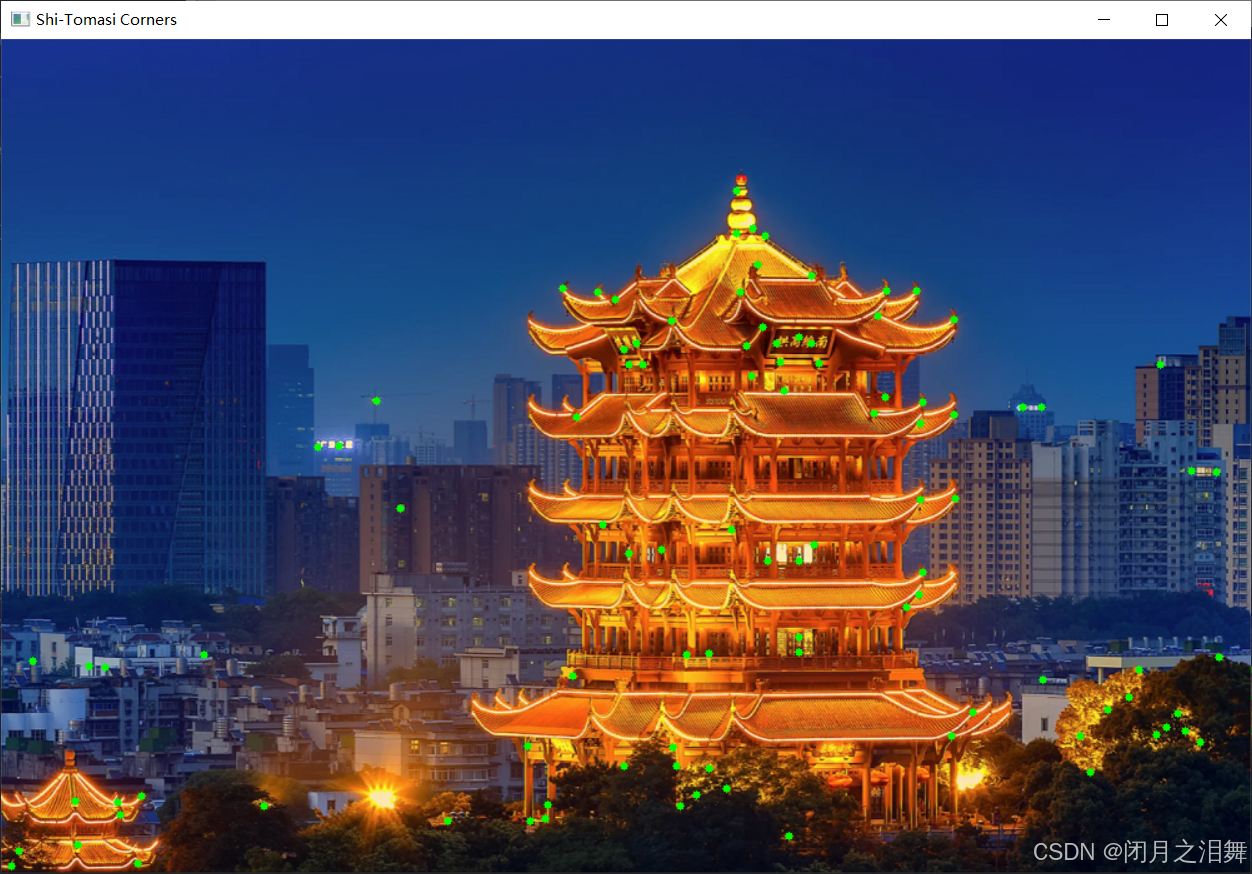
corners = cv2.goodFeaturesToTrack(gray, maxCorners=100, qualityLevel=0.01, minDistance=10)
corners = np.int0(corners) # 转换为整数坐标# 绘制角点
for corner in corners:x, y = corner.ravel()cv2.circle(img, (x, y), 3, (0, 255, 0), -1) # 绿色圆点标记cv2.imshow('Shi-Tomasi Corners', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
3、FAST 角点检测(快速角点检测)
1. 原理
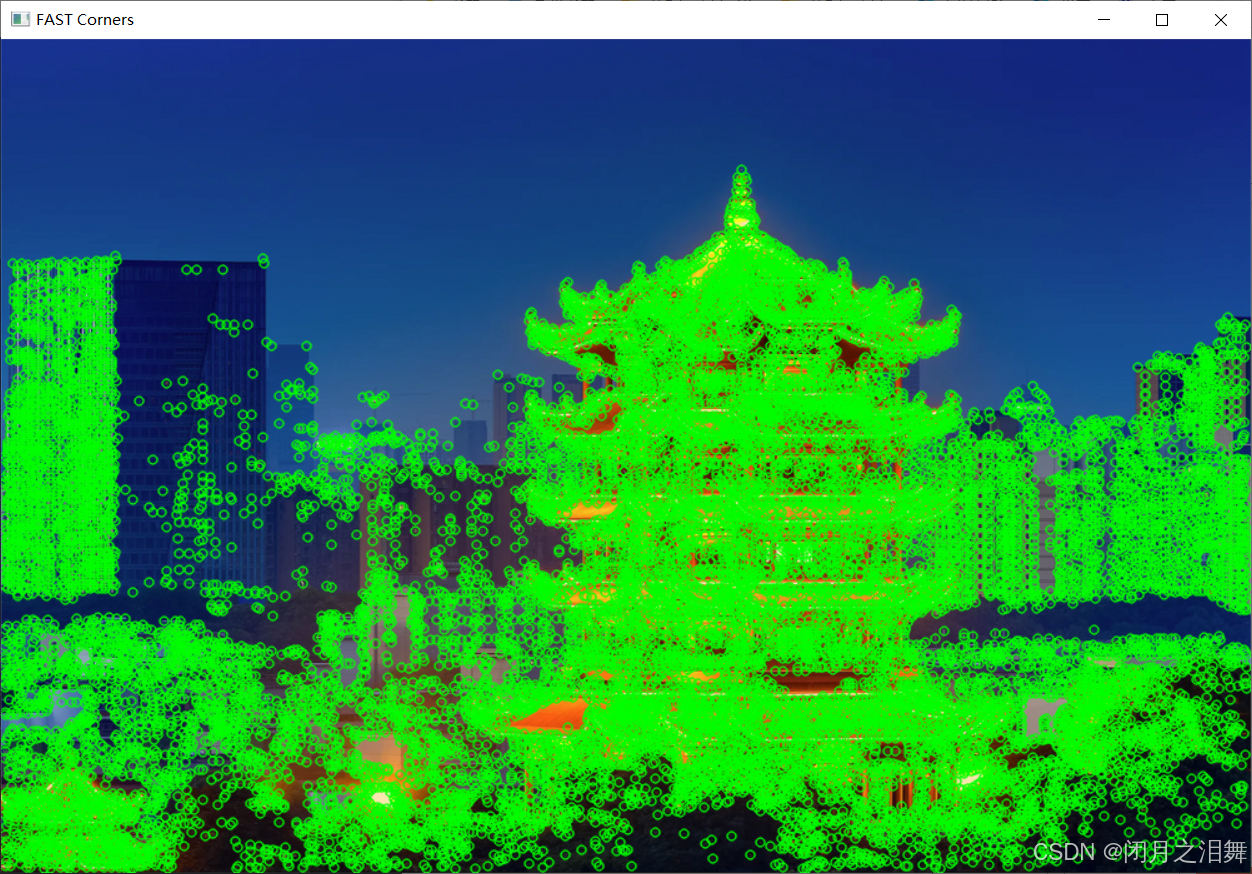
基于像素灰度差异的高效角点检测算法,核心思想是:若某像素点与其周围 16 个像素中的 N 个(如 9 个)灰度差异足够大,则认为是角点(称为 FAST-9)。
- 优点:速度极快,适合实时应用。
- 缺点:对噪声敏感,需结合非极大值抑制(NMS)筛选角点。
2. OpenCV 函数
fast = cv2.FastFeatureDetector_create(threshold=10, nonmaxSuppression=True)
corners = fast.detect(gray_img, None)
- 参数:
threshold:灰度差异阈值(值越小,检测到的角点越多)。nonmaxSuppression:是否启用非极大值抑制(建议设为 True,避免密集角点)。
- 输出:
KeyPoint对象列表,包含角点坐标、大小等信息。
3. 示例代码
import cv2img = cv2.imread('fast_corner.jpg', cv2.IMREAD_GRAYSCALE)# 创建FAST检测器
fast = cv2.FastFeatureDetector_create(threshold=10, nonmaxSuppression=True)# 检测角点
corners = fast.detect(img, None)# 绘制角点
img_color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
cv2.drawKeypoints(img_color, corners, img_color, color=(0, 255, 0), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)cv2.imshow('FAST Corners', img_color)
cv2.waitKey(0)
cv2.destroyAllWindows()
二、算法对比与选择
| 算法 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| Harris | 经典方法,检测稳定 | 计算量大,角点密集 | 学术研究、全局角点检测 |
| Shi-Tomasi | 跟踪效果好,抑制边缘响应 | 依赖参数调优 | 图像跟踪(如 LK 光流) |
| FAST | 速度极快,适合实时应用 | 对噪声敏感,需 NMS | 实时系统(如无人机、机器人) |
三、注意事项
-
输入图像预处理:
- 必须为单通道灰度图(彩色图需先转换为灰度图)。
- 建议先进行高斯模糊降噪(如
cv2.GaussianBlur),减少噪声对角点检测的影响。
-
参数调优:
qualityLevel(Shi-Tomasi)和threshold(FAST)需根据图像对比度调整,避免检测到过多或过少角点。minDistance用于控制角点密度,避免相邻过近的角点。
-
角点响应可视化:
- Harris 的响应值需通过阈值(如全局最大值的 1%~5%)筛选后标记。
-
Shi-Tomasi 和 FAST 可直接通过坐标绘制角点。
总结
角点检测是图像特征提取的基础步骤,OpenCV 提供了从经典(Harris)到高效(FAST)的多种算法。选择时需结合场景需求:
- 追求精度和稳定性:Shi-Tomasi(推荐用于跟踪任务)。
- 追求速度:FAST(需配合 NMS 和降噪)。
- 学术研究或通用场景:Harris(理解角点检测的数学原理)。 通过合理调整参数和预处理,可有效提升角点检测的效果,为后续计算机视觉任务奠定基础。




