图像平滑
图像邻域运算
一个点的邻域:以该点为中心的矩形内部或边界上点的集合
均值运算:
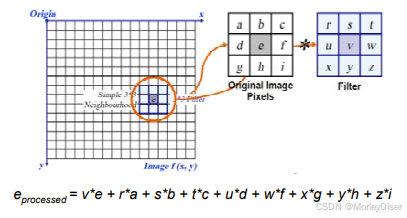
模板运算:
图像噪声
图像噪声:图像在获取或传输的过程中受到随机信号的干扰,在图像上出现的一些随机的、离散的、孤立的像素点
图像噪声的分类(按照噪声和信号之间的关系):
(1)加性噪声
与图像信号的强度之间不相关
![]()
(2)乘性噪声
与图像信号有关

(3)按其概率密度函数特征分类
图像平滑的目的:消除或尽量减少噪声的影响,改善图像的质量
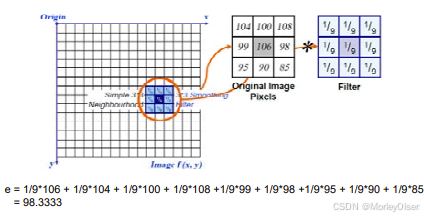
均值滤波
均值滤波:用某像素周围n×n像素范围的平均值,置换该像素值
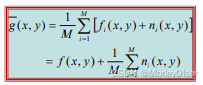
噪声方差减小M倍,信噪功率比增加M倍
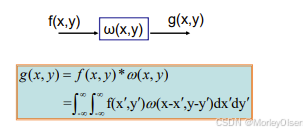
线性系统:输出g(x,y)通过输入f(x,y)经过卷积w(x,y)获得
均值滤波器的基本假设:
(1)图像由许多灰度恒定的小块组成
(2)图像上的噪声是加性的、均值为零,与图像信号互不相关
高斯滤波
采用高斯函数作为加权函数的原因:
(1)二维高斯函数具有旋转对称性,保证滤波时各方向平滑程度相同
(2)离中心点越远权值越小,确保边缘细节不被模糊
参数解释:
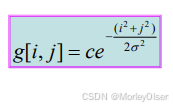
(1)设定σ^2和n,确定高斯模板权值
(2)c是归一化常量(在阵列的一个角点处取一个值,并选择c使得该角点处的值为1)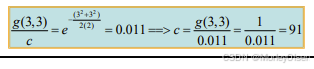
(3)在n×n窗口上,σ^2越大,平滑程度越好
模板的权值之和不等于1时,输出时需要规范化
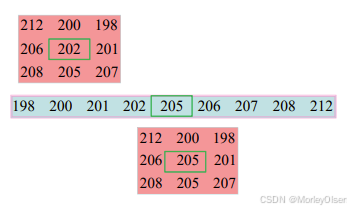
中值滤波
中值滤波:用含有奇数点的滑动窗口,将邻域中的像素按灰度级排序取中间值为输出像素
排序滤波器:输出值依赖于根据滤波器窗口内像素灰度值的排序顺序的滤波器
优点:对脉冲干扰和椒盐噪声的抑制效果好,在抑制随机噪声的同时能有效保护边缘少受模糊。
缺点:对点和线等细节较多的图像不太适合。
主要难点:如何正确选择窗口尺寸的大小
自适应滤波
wiener滤波:根据其局部方差来调整滤波器的输出
计算局部矩阵的均值和方差:

利用wiener滤波器估计出其灰度值:(v^2是图像中噪声的方差)

边缘保持滤波
边缘:图像中像素的值有突变的地方
物体间的边界:现实场景中的存在于物体之间的边界
不规则模板应用的案例(最小均方差滤波器):
【1】在某像素的周围5×5邻域内,有9个模板
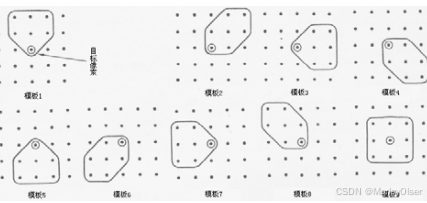
【2】假设n个像素的值分别是P0、P1、P2、… Pn-1,计算均值和方差

【3】选择方差最小的模板,求其均值作为目标像素的值
把 5×5 邻域分割成 9 个小区域,寻找其中最平坦的小区域(即无噪声和无边缘)作为输出,就可以消除噪声

案例2:
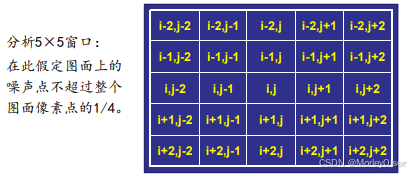
【1】假设
【2】对整幅图像求标准偏差,以此作为阈值T
T代表图像的明暗变化程度
对于平坦区域,各个像素点之间的差值肯定小于T
对于边缘点,一般可保证一半的差值大于T,另一半小于T
【3】模板中,浅蓝色部分为参与排序的像素点

本节要点