一、数据采集
1、LiDAR 传感器的 LiDAR PCD 数据
2、来自 IMU 传感器的姿势文件
3、手动测量传感器之间外部参数初始值并写入的 JSON 文件
二、下载标定工具
//总的git地址:
https://github.com/PJLab-ADG/SensorsCalibration
git地址:
https://github.com/PJLab-ADG/SensorsCalibration/tree/master/lidar2imu
//修改了git中的CMakeLists.txt编译通过
//百度网盘地址
链接: https://pan.baidu.com/s/1B4GEbVgg6sY4xeE3D_ASXQ?pwd=bdht 提取码: bdht
--来自百度网盘超级会员v5的分享
三、手动标定
./run_lidar2imu <lidar_pcds_dir> <lidar_pose_file> <extrinsic_json>
- lidar_pcds_dir:来自 LiDAR 传感器的 LiDAR PCD 数据
- lidar_pose_file:来自 IMU 传感器的姿势文件
- extrinsic_json:传感器之间外部参数初始值的 JSON 文件
运行示例
cd ~./manual_calib/
./bin/run_lidar2imu data/top_center_lidar data/top_center_lidar-pose.txt data/gnss-to-top_center_lidar-extrinsic.json
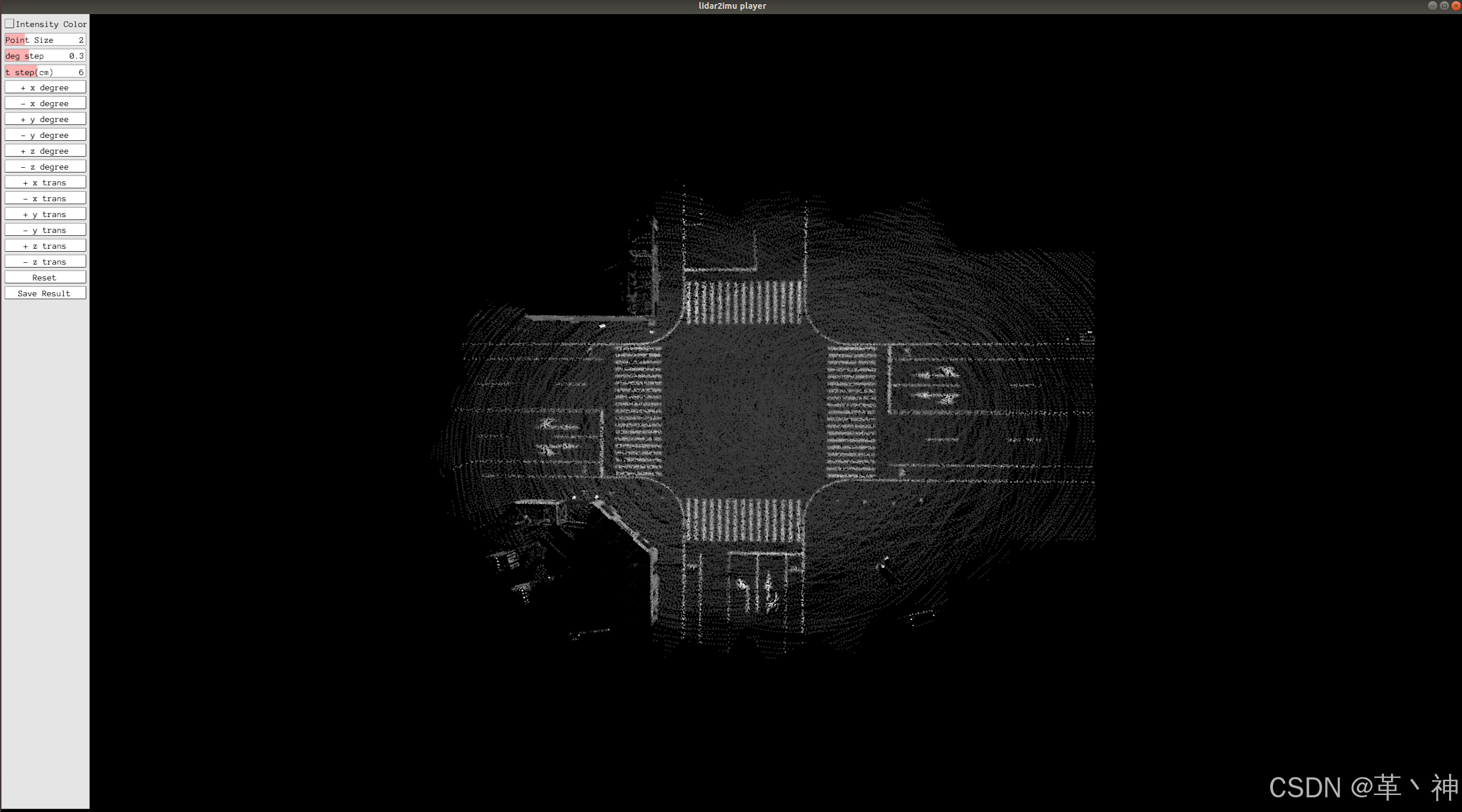
标定窗口由左侧控制面板和右侧点云界面组成,左侧控制面板用于手动标定,右侧点云界面用于查看点云序列是否对齐,用户可以通过点击面板上相应的按钮或者使用键盘输入调整外参来查看点云序列是否对齐,当点云序列对齐后,标定结束,点击保存按钮保存结果。
-
Intensity Color:LiDAR 强度记录为激光束的回波强度,部分基于被激光脉冲击中的物体的反射率。此按钮可以将显示模式更改为强度图显示模式。这有助于检查地面车道线是否对齐。
-
deg step t step :这两个按钮会随着每次点击或键盘输入而改变调整步骤。
-
point size:调整投影图像中激光雷达点的大小。
-
Reset:按下 按钮重置所有手动调节。
-
Save Result:如果按下此按钮,结果将默认存储在运行目录中~./manual_calib/:
四、标定结果
Extrinsic:
R:
0.0121008 -0.999863 -0.0112902
0.0133341 0.0114512 -0.999846
0.999838 0.0119484 0.0134707
t: 0.0134153 -0.352602 -0.575013************* json format *************
Extrinsic:
[0.0121008,-0.999863,-0.0112902,0.0134153],[0.0133341,0.0114512,-0.999846,-0.352602],[0.999838,0.0119484,0.0134707,-0.575013],[0,0,0,1]





