目录
- 1.算法原理
- 3.结果展示
- 4.参考文献
- 5.代码获取
1.算法原理
RRT(Rapidly-Exploring Random Trees) 快速随机扩展树,是一种单一查询路径规划算法。RRT 将根节点作为搜索的起点,然后通过随机撒点采样增加叶子节点的方式,生成一个随机扩展树,当新采样的叶子节点进入目标范围内,就得到了从起点位置到目标位置的路径。
RRT*是RRT改进版本,其目的是解决 RRT 算法难以求解最优的可行路径的问题。
算法图解(非原创)
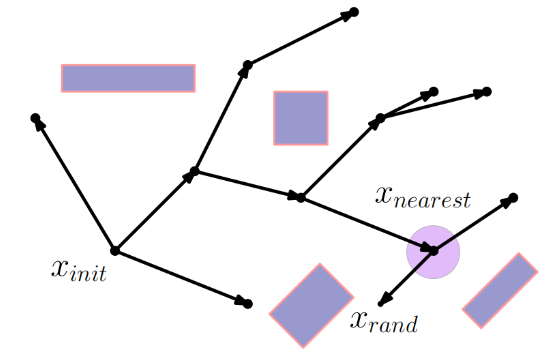
1.1生成随机点Xrand

1.2扩展树上找到与Xrand最近节点Xnearest

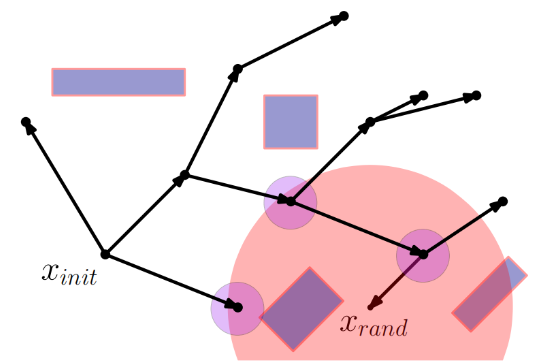
1.3 尝试将Xnearest作为Xrand父节点,连接
1.4 以Xrand为中心,r为半径在扩展树搜索潜在父节点
1.5 尝试将潜在父节点与Xrand连接(不考虑避障)
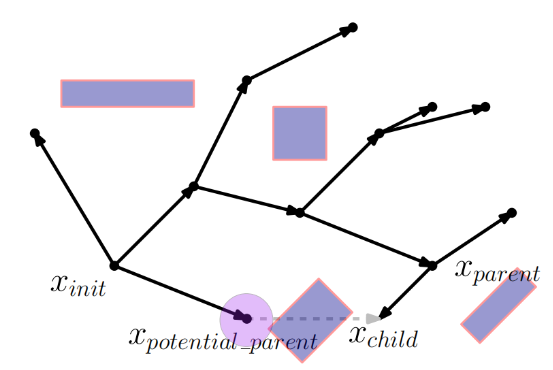
1.6 代价比较,如果新路径代价小于原路径代价,则进行碰撞检测,如果碰撞则舍弃
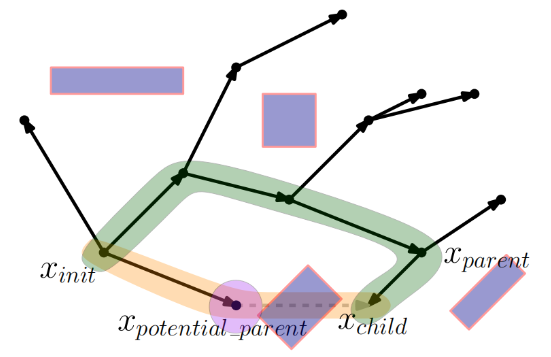
1.7 代价比较,如果新路径代价小于原路径代价,并且未碰撞,则更新Xchild的父节点,并且将原父节点删除

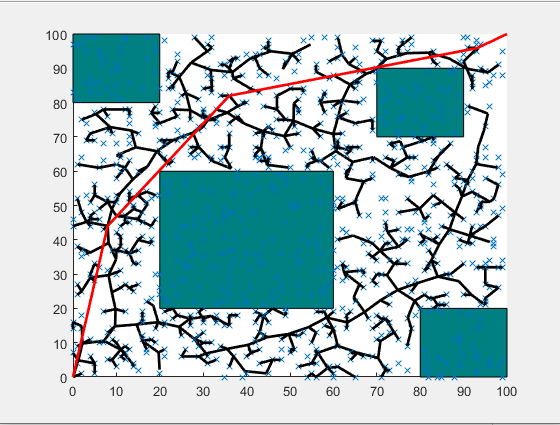
3.结果展示

4.参考文献
[1] https://blog.csdn.net/yuxuan20062007/article/details/88843690
[2] https://zhuanlan.zhihu.com/p/51087819

——测试原则、阶段、测试用例设计、调试)



