第一部分:核心原理模块化拆解
模块1:多源传感器物理层融合
关键技术:
-
高精度同步采集架构
- 采用PXIe-8840控制器+同步定时模块(NI PXIe-6674T),实现CAN/LIN/模拟量信号的μs级同步
- 光纤电压传感器(LEM CV3-1000)与分流器(Isabellenhütte SMS 1000A)并联,解决高压隔离与动态响应矛盾
- 振动信号预处理:PCB 356A16 IEPE传感器→抗混叠滤波器(截止频率5kHz,衰减斜率-120dB/dec)
-
动态误差补偿算法
- 电流传感器温度漂移补偿:
I c o r r e c t e d = I r a w × [ 1 + α ( T s e n s o r − 25 ℃ ) ] + β ( T j u n c t i o n − T a m b i e n t ) I_{corrected} = I_{raw} \times [1 + α(T_{sensor} - 25℃)] + β(T_{junction} - T_{ambient}) Icorrected=Iraw×[1+α(Tsensor−25℃)]+β(Tjunction−Tambient)
(α=75ppm/℃, β=0.1%/K,需现场标定)
- 电流传感器温度漂移补偿:
模块2:能量流实时建模
模型构建流程:
# 基于dSPACE SCALEXIO的实时模型
def energy_flow_model():# 电机功率计算(考虑铁损与铜损)P_motor = V_bus*I_phase*η_inverter - (K_hyst*f + K_eddy*f²) - I²*R_phase# 传动损耗计算(温度修正)η_gearbox = 0.98 - 0.0005*(T_oil-80) if T_oil>80 else 0.98# 能量流拓扑energy_map = {'Battery→Inverter': P_batt,'Inverter→Motor': P_motor,'Motor→Wheel': P_motor*η_gearbox}return energy_map
模块3:能效优化控制闭环
核心算法实现:
- 动态权重分配策略
使用模糊PID控制器调节冷却系统功率:% 输入变量:T_batt, SOC, dP/dt fis = mamfis('Name','cooling_control'); fis = addInput(fis,[20 45],'Name','T_batt'); fis = addInput(fis,[0.2 0.8],'Name','SOC'); fis = addOutput(fis,[0 1000],'Name','P_cooling'); % 规则库示例:IF T_batt is High AND SOC is Low THEN P_cooling=High - SiC器件驱动优化
采用双脉冲测试确定最佳开关频率:
f s w _ o p t = P c o n d P s w = I r m s 2 R d s ( o n ) ( E o n + E o f f ) / T p e r i o d f_{sw\_opt} = \sqrt{\frac{P_{cond}}{P_{sw}}} = \sqrt{\frac{I_{rms}^2 R_{ds(on)}}{(E_{on}+E_{off})/T_{period}}} fsw_opt=PswPcond=(Eon+Eoff)/TperiodIrms2Rds(on)
第二部分:工程作业指导书(能量流测试专项)
作业1:高压系统能效测试
步骤1:传感器部署
- 动力电池包:部署4个HBM S9M电压传感器(量程0-1000V,精度±0.05%),间距≤200mm
- 电机三相线:安装3个Danisense MCS2000电流传感器(带宽DC-200kHz),需确保导体居中以降低涡流误差
- 冷却管路:在进出水口安装2个STS TM411温度传感器(RTD Pt100,响应时间<0.5s)
步骤2:动态工况测试
- 执行CLTC-P循环时,监控以下参数:
参数 采样率 触发条件 异常阈值 电池电流 10kHz dI/dt>100A/s 纹波>5% 电机温度 100Hz T>150℃ 梯度>3℃/s 逆变器效率 1kHz η<92% 连续3个周期
步骤3:损耗溯源分析
- 拆解能量损失项:
P l o s s = P b a t t − ( P m o t o r + P a u x ) P_{loss} = P_{batt} - (P_{motor} + P_{aux}) Ploss=Pbatt−(Pmotor+Paux) - 使用热成像仪(FLIR T865)定位线束热点,测量接触电阻:
R c o n t a c t = Δ V I − R c a b l e R_{contact} = \frac{\Delta V}{I} - R_{cable} Rcontact=IΔV−Rcable - 对IGBT进行双脉冲测试,提取开关损耗曲线
作业2:热管理优化测试
关键操作:
-
低温环境测试(-30℃冷启动):
使用ESPEC温控箱,以2℃/min速率降温,记录以下数据:- PTC加热功率与热泵COP对比(目标:能耗降低40%)
- 电池预热阶段电流纹波(要求<50mA)
-
高温散热测试(45℃爬坡工况):
调整冷却风扇PWM占空比(步长5%),找到最佳工作点:// 风扇控制代码示例(基于Simulink自动生成) void update_fan_speed(float T_batt, float V_vehicle) {static float duty_cycle = 0.5;if (T_batt > 45.0 && V_vehicle > 30.0) {duty_cycle += 0.05;} else if (T_batt < 40.0 || V_vehicle < 10.0) {duty_cycle -= 0.03;}pwm_set(FAN_PIN, duty_cycle); }
作业3:算法验证与标定
验证流程:
- 在dSPACE ASM整车模型注入噪声(SNR<20dB),测试融合算法鲁棒性
- 使用AVL Concerto数据平台进行参数敏感性分析:
- 关键参数:电流采样延迟(0.1-1ms)、温度测量误差(±0.5-2℃)
- 优化目标:SOC估算误差<1%,效率计算偏差<0.5%
- 实车标定步骤:
- 在30%-70% SOC区间,以10%为步长进行充放电测试
- 每个工况点持续5分钟,记录至少3次稳定数据
- 使用最小二乘法拟合效率曲线:
η = a 0 + a 1 I + a 2 I 2 + a 3 T η = a_0 + a_1 I + a_2 I^2 + a_3 T η=a0+a1I+a2I2+a3T
第三部分:进阶调试技巧
-
电磁干扰对策
- 在电机高压线缆周围布置Mu-metal屏蔽层(厚度≥0.3mm)
- 对模拟信号线实施双绞线+铁氧体磁环(TDK ZCAT2035-0930)
-
时序同步校准
- 使用泰克MSO64示波器+光脉冲触发,对齐各传感器时间戳
- 校正公式:
t a d j u s t e d = t r a w − L c a b l e × ε r c t_{adjusted} = t_{raw} - \frac{L_{cable} \times ε_r}{c} tadjusted=traw−cLcable×εr
(ε_r:线缆介电常数,需实测)
-
边缘计算部署
- 在BMS端部署TI TDA4VM处理器,运行轻量化LSTM模型:
# TensorFlow Lite模型转换 converter = tf.lite.TFLiteConverter.from_saved_model(lstm_model) converter.optimizations = [tf.lite.Optimize.DEFAULT] tflite_model = converter.convert()
- 在BMS端部署TI TDA4VM处理器,运行轻量化LSTM模型:
虽然传感器融合技术已经取得了显著的进步,但它在汽车系统中的实现仍在不断发展。趋势是朝着更智能、分布式的处理,以及物体数据的标准化通信方向发展。这些概念似乎很明确,尽管实现方式仍在不断演变。尽管如此,随着今天正在开发的车辆越来越接近上路,原始设备制造商(OEM)将提供更多关于这项技术发展方向的细节。
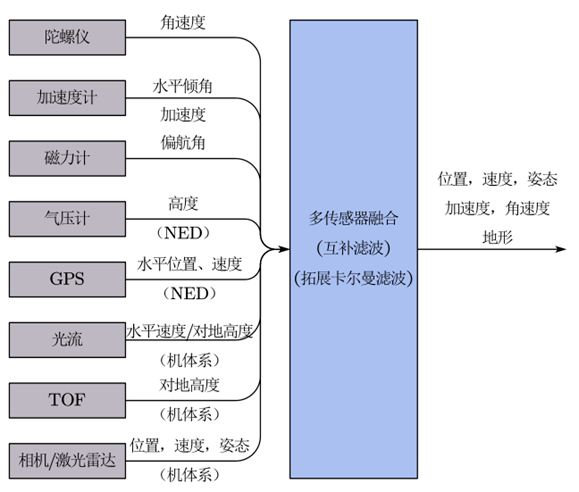
如何将多个传感器的数据处理并融合估计无人机/机器人状态,一直是无人机/机器人领域重要的研究课题。多传感器数据融合中,难点包括数据预处理,数据融合及异常处理等。
本指南可直接应用于:
- 高压部件选型验证(如比较SiC与IGBT的实际损耗差异)
- 测试方案设计(制定传感器布局与采样策略)
- 算法快速迭代(基于硬件在环的实时调参)
建议结合具体项目数据,重点突破时序对齐精度与多物理场耦合建模两大技术瓶颈。



:最接近的三数之和,接雨水)

)